

Manuscript about ITISE: an Interactive Software Tool for System Identificati...
Intermediate
Peer Reviewed Paper
Theory
The paper describes the conceptual basis, main features and functionality of an interactive software tool developed in support of system identification education and discovery.
This...
See More
Various games for learning Controller Design
Intermediate
App
Theory
Since 2005, we are using educational games in the course „Einführung in die Regelungstechnik“ (Introduction to automatic control).
The project started with the game spaceballRT, which uses...
See More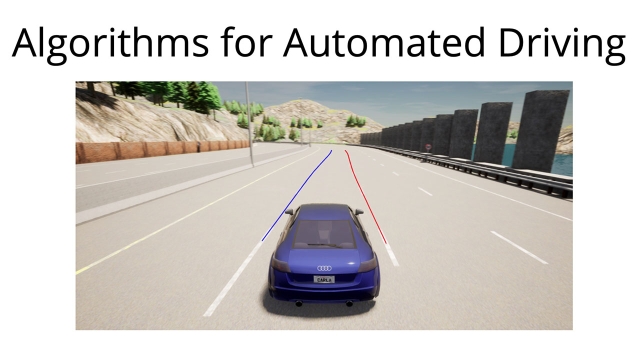
Algorithms for Automated Driving
Intermediate
Project
Application
Each chapter of this (mini-)book guides you in programming one important software component for automated driving. Currently, this book contains two chapters: Lane Detection, and Control...
See More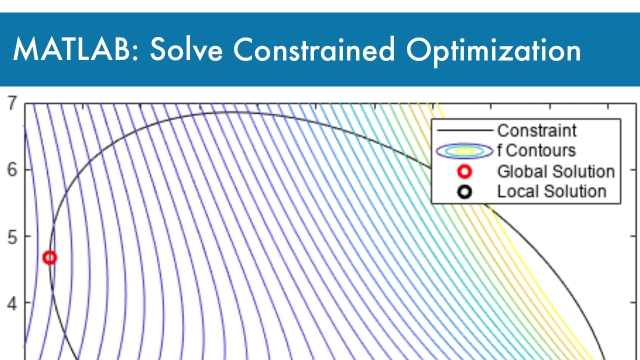
MATLAB Example: Solve Constrained Nonlinear Optimization, Problem-Based
Intermediate
Example
Theory
This example shows how to find the minimum of a nonlinear objective function with a nonlinear constraint by using the problem-based approach.
See More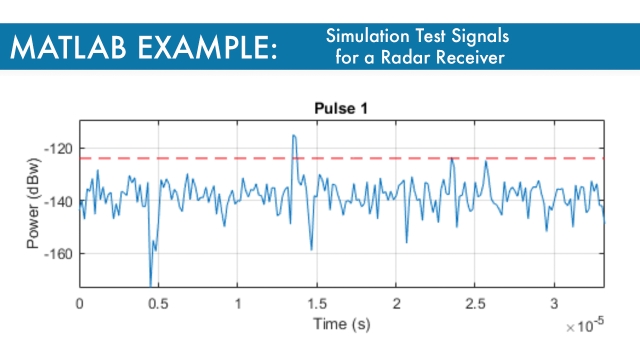
Simulating Test Signals for a Radar Receiver
Intermediate
Example
Application
This example shows how to simulate received signal of a monostatic pulse radar to estimate the target range. A monostatic radar has the transmitter collocated with the receiver. The...
See More
Virtual Labs for control education
Intermediate
Virtual Lab
Theory
This resource provides different links to virtual and remote labs that can be used for control education. Virtual and remote labs are very powerful tools for learning and teaching, that...
See More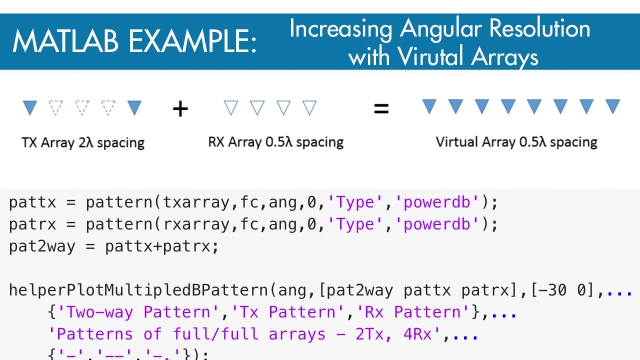
Increasing Angular Resolution with Virtual Arrays
Intermediate
Example
Application
This MATLAB example introduces how forming a virtual array in MIMO radars can help increase angular resolution. It shows how to simulate a coherent MIMO radar signal processing chain using...
See More
EGGN 510 - Lecture 02-1 Digital Image Fundamentals
9 min
Beginner
Video
Theory
This is a video lecture of EGGN 510 Image and Multidimensional Signal Processing by William Hoff.
See More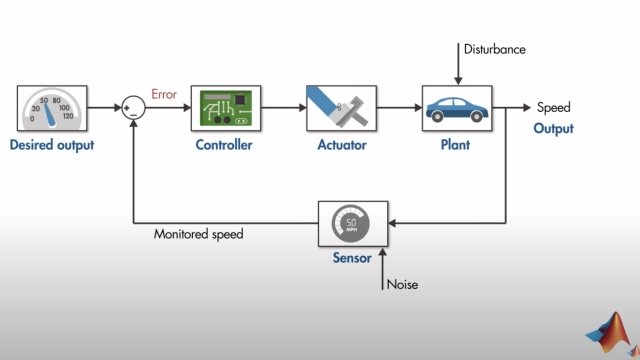
Understanding Control Systems: Components of a Feedback Control System
5 min
Beginner
Video
Demonstration
This video introduces the components of a feedback control system and how they interact with each other.
Learn basic terminology by walking through examples that include driving a car...
See More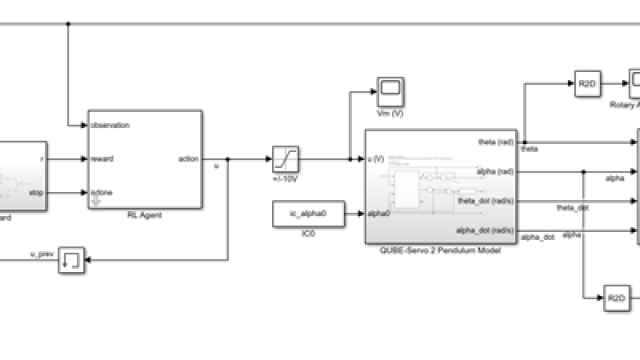
Using the Reinforcement Learning Toolbox™ to Balance an Inverted Pendulum
30 min
Intermediate
Article / Blog
Application
Reinforcement learning (RL) is a subset of Machine Learning that uses dynamic data, not static data like unsupervised learning or supervised learning. Reinforcement learning is used in many...
See More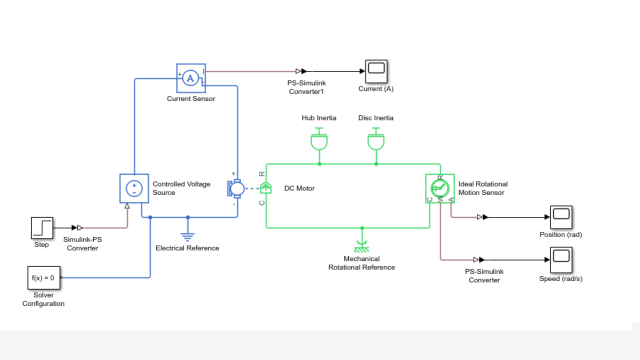
Using Simscape™ to Model a Quanser QUBE-Servo 2 with Friction
15 min
Intermediate
Article / Blog
Theory
Modelling a DC servomotor is one of the common examples used in control system textbooks and courses. Given that so many systems use DC motors, e.g. robot manipulator arms, it’s an important...
See More
Systems Engineering, Part 1: What Is Systems Engineering?
15 min
Beginner
Video
Theory
This video covers what systems engineering is and why it’s useful. We will present a broad overview of how systems engineering helps us develop complex projects that meet the program...
See More
How Simulations Work
30 min
Beginner
Article / Blog
Theory
This article sets out the critical aspects of building good simulations — that is, simulations that are accurate, easy to develop and analyze, and fast. The first sections deal with how a...
See More
Guaranteed Margins for LQR Regulators
10 min
Intermediate
Peer Reviewed Paper
Theory
John Doyle's famous paper! He presents a counterexample that shows that are no guaranteed margins for LQG systems.
See More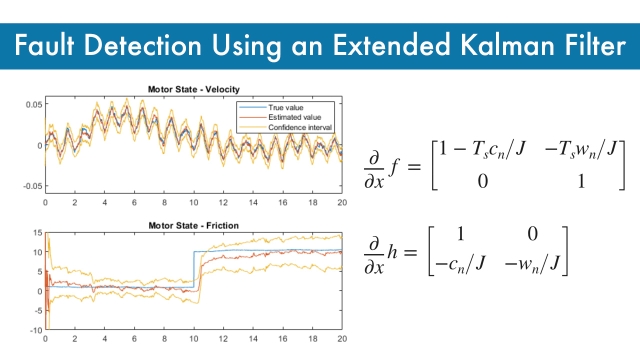
MATLAB Example: Fault Detection Using an Extended Kalman Filter
Intermediate
Project
Application
This example shows how to use an extended Kalman filter for fault detection. The example uses an extended Kalman filter for online estimation of the friction of a simple DC motor...
See More
What Is Extremum Seeking Control? | Learning-Based Control
16 min
Beginner
Video
Theory
Get an introduction to extremum seeking control—an adaptive control method for finding an optimal control input or set of system parameters without needing a model of your system, static...
See More
Advances in feedforward control for measurable disturbances (in Spanish)
60 min
Intermediate
Video
Theory
The efficient compensation of load disturbances is one of the most important tasks in any control system. Most industrial processes are affected by disturbances and only feedback is commonly...
See More
Understanding the Z-Transform
20 min
Beginner
Video
Theory
This intuitive introduction shows the mathematics behind the Z-transform and compares it to its similar cousin, the discrete-time Fourier transform. Mathematically, the Z-transform is...
See More
Interactive Tools for Control Purposes
Intermediate
App
Theory
This resource provides different links to Interactive Tools that can be used for control education. Interactive Tools are very powerful educational resources as support to learning and...
See More
Nyquist Stability Criterion, Part 2
18 min
Beginner
Video
Theory
An explanation of the Nyquist Stability Criterion part 2. This video steps through the how to sketch a Nyquist plot by hand, what to do if there are open loop pools on the imaginary axis...
See More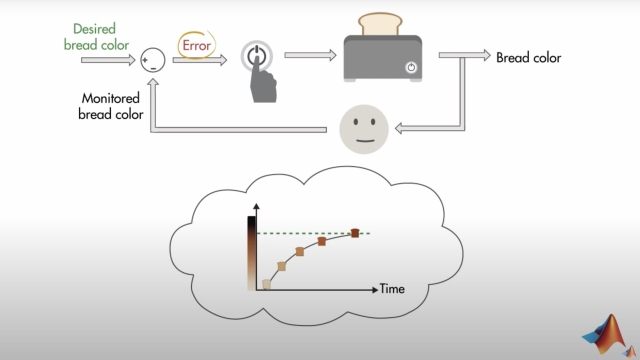
Understanding Control Systems: Feedback Control Systems
6 min
Beginner
Video
Theory
This video provides introductory examples to learn about the basics of feedback control (closed-loop control) systems.
Learn how feedback control is used to automate processes and discover...
See More
MATLAB toolbox for control 101 course
Beginner
Software
Theory
Community toolbox project led by Anthony Rossiter and sponsored by MathWorks. The project incorporates input from various international collaborators. The aim is to make the developed...
See More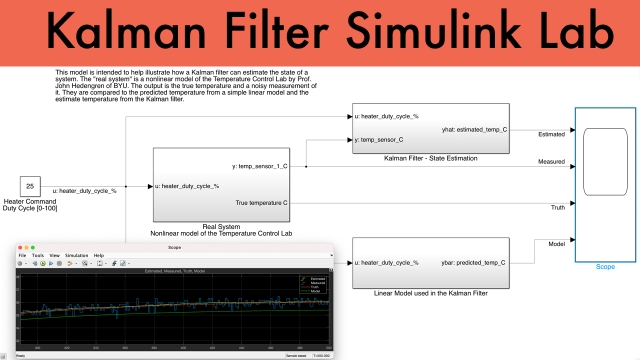
Kalman Filter Simulink 2022A example
Intermediate
Virtual Lab
Demonstration
This model is intended to help illustrate how a Kalman filter can estimate the state of a system. The "real system" is a nonlinear model of the Temperature Control Lab by Prof. John...
See More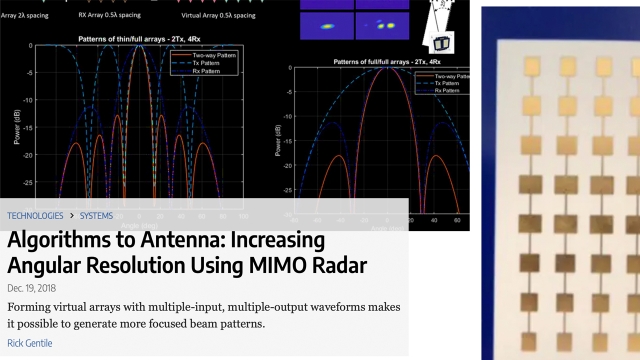
Algorithms to Antenna: Increasing Angular Resolution Using MIMO Radar
Intermediate
Article / Blog
Theory
Articles in Microwaves & RF that talks about how forming virtual arrays with multiple-input, multiple-output waveforms makes it possible to generate more focused beam patterns.
See More
But what is the Fourier Transform? A visual introduction.
20 min
Beginner
Video
Theory
An animated introduction to the Fourier Transform.
See More