

Wind Tunnel Testing: Introduction and Data Acquisition
28 min
Intermediate
Video
Theory
This is the first of our 3 part series on wind tunnel testing. In this video, we introduce the concept of wind tunnel testing as well as discuss the process for acquiring aerodynamic data in...
See More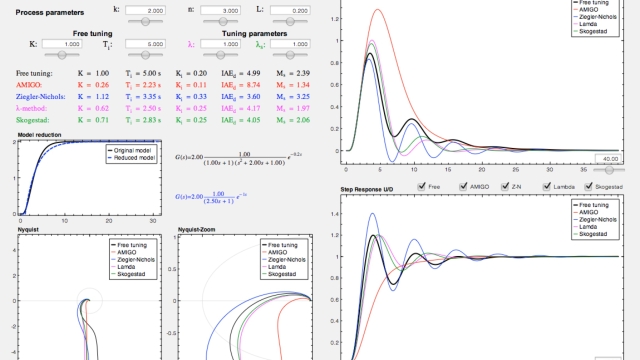
Interactive Tool about PID tuning rules
Intermediate
App
Application
Hundreds of PID design methods are available in literature. Many of them are very similar and sometimes it is not straightforward to understand their purposes. This interactive software tool...
See More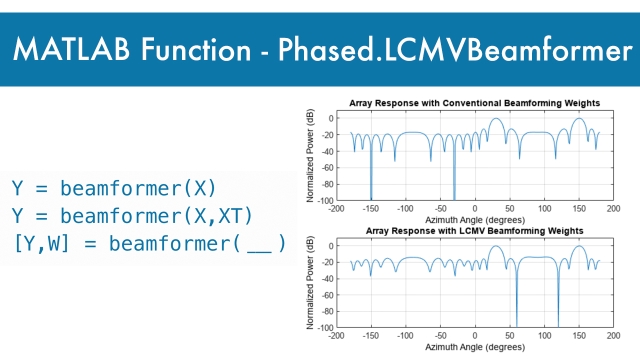
MATLAB function: phased.LCMVBeamformer
Intermediate
Article / Blog
Application
The phased.LCMVBeamformer object implements a narrowband linear-constraint minimum-variance (LCMV) beamformer for a sensor array. The LCMV beamformer belongs to the family of constrained...
See More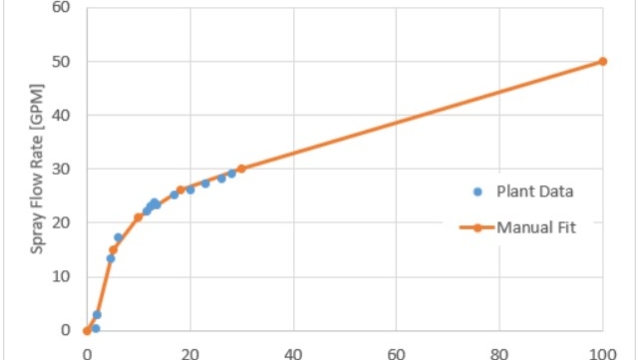
Output Characterization to Linearize a Loop - Control valve application
20 min
Intermediate
Article / Blog
Application
This application paper explains how a control valve created nonlinearity in a loop and how output characterization solved the problem
See More
Why the Riccati Equation Is important for LQR Control
14 min
Intermediate
Video
Theory
This Tech Talk looks at an optimal controller called linear quadratic regulator, or LQR, and shows why the Riccati equation plays such an important role in solving it efficiently. The talk...
See More
Using Transfer Learning | Deep Learning for Engineers, Part 4
16 min
Beginner
Video
Theory
This video introduces the idea of transfer learning. Transfer learning is modifying an existing deep network architecture and then retraining it to accomplish your task rather than the task...
See More
Converting Constrained Optimization to Unconstrained Optimization Using the ...
54 min
Beginner
Video
Theory
In this video we show how to convert a constrained optimization problem into an approximately equivalent unconstrained optimization problem using the penalty...
See More
Real-Time Software Implementation of Analog Filters
14 min
Intermediate
Video
Application
Modelling analog filters, discretisation, and implementation of the digitally-equivalent filters on a real-time, embedded system (STM32). Includes theory, DSP, firmware, and results.
See More
Controlling Robotic Swarms
13 min
Beginner
Video
Theory
Come with me to the Robotics, Aerospace, and Information Networks lab at the University of Washington to learn the basics of swarm robotics. Find out how simple distributed algorithms can...
See More
Autodesk Tinkercad
Beginner
App
Application
Tinkercad is a free, easy-to-use web app that equips the next generation of designers and engineers with the foundational skills for innovation: 3D design, electronics, and coding!
See More
DSP Related
Beginner
Article / Blog
Application
Website with a lot of good content for any DSP scientists, researchers, and developers.
See More
TCLab: An Inexpensive Experimental Platform for Students to Learn Feedback
5 min
Beginner
Video
Demonstration
The temperature control lab (TCLab) reinforces process feedback control with real data. The TCLab hardware consists of an Arduino® shield that fits onto a standard Arduino Leonardo...
See More
Model Reference Adaptive Control Fundamentals (Dr. Tansel Yucelen)
91 min
Beginner
Video
Theory
Forum on Robotics & Control Engineering (FoRCE, http://force.eng.usf.edu/) Seminar Series: "Model Reference Adaptive Control Fundamentals" (Dr. Tansel Yucelen)
See More![Denoising Data with FFT [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_358.jpg?itok=BSMOuW9N "Denoising Data with FFT [Matlab]")
Denoising Data with FFT [Matlab]
10 min
Beginner
Video
Application
This video describes how to clean data with the Fast Fourier Transform (FFT) in Matlab.
See More
Velocity & Acceleration in Non-Inertial Reference Frames (Coriolis &...
133 min
Intermediate
Video
Theory
In this video we derive a mathematical description of velocity and acceleration in non-inertial reference frame. We examine the effect of fictitious forces that are witnessed by observers on...
See More
crash course on complex numbers
10 min
Beginner
Video
Theory
In this video, we quickly review “Complex Numbers”. The following materials are covered:1- Cartesian and polar representation of complex numbers2- how to con...
See More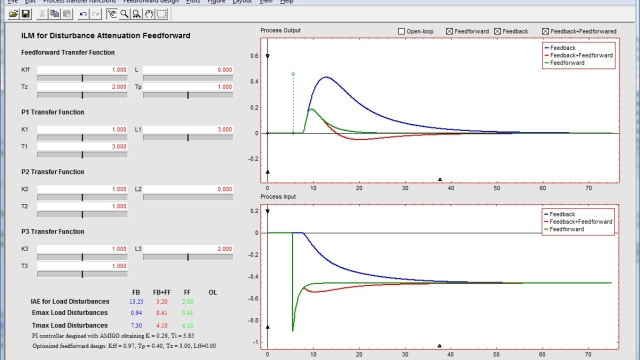
An interactive feedforward tool for FeedForward Control
Beginner
App
Application
This interactive software tool is focused on basic and advanced concepts of feedforward control.
See More
The Fast Fourier Transform Algorithm
10 min
Beginner
Video
Theory
Here I discuss the Fast Fourier Transform (FFT) algorithm, one of the most important algorithms of all time.
See More
Time domain - tutorial 8: LTI systems, impulse response & convolution
13 min
Beginner
Video
Theory
In this video, the following materials are covered:1) the beauty of linear & time invariant (LTI) systems2) why the impulse response of an LTI system is so i...
See More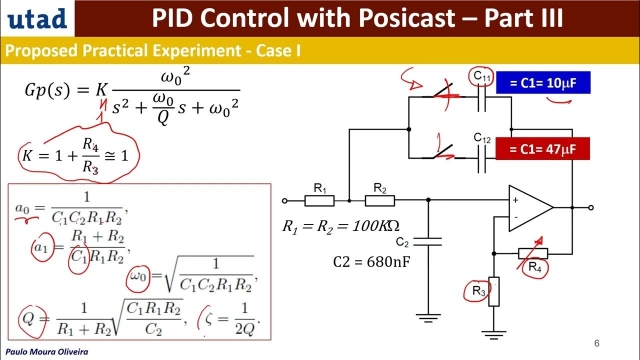
PID Control with Posicast, 9 - (In English)
11 min
Beginner
Video
Theory
This is part III of PID control with Posicast
See More
Lecture 12: Steady state error
26 min
Beginner
Video
Theory

Laplace Transforms to Derive Transfer Functions
14 min
Beginner
Video
Theory
Once we have a state space model, we will take a Laplace Transform to derive the transfer function to determine the response of an output relative to an inpu...
See More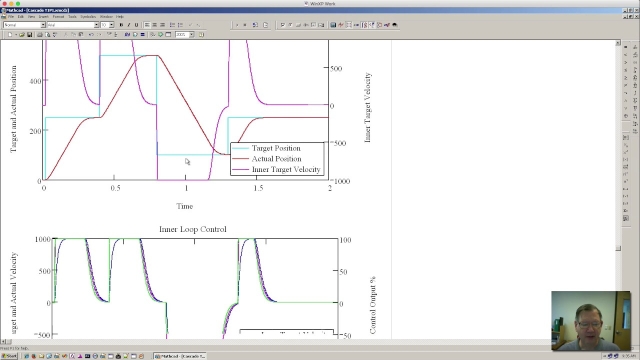
Peter Ponders PID - Cascade Control Part2
14 min
Beginner
Video
Theory
The inner loop pole locations and gains are calculated first so the inner loop pole locations are determined by the user. The outer loop poles are still pla...
See More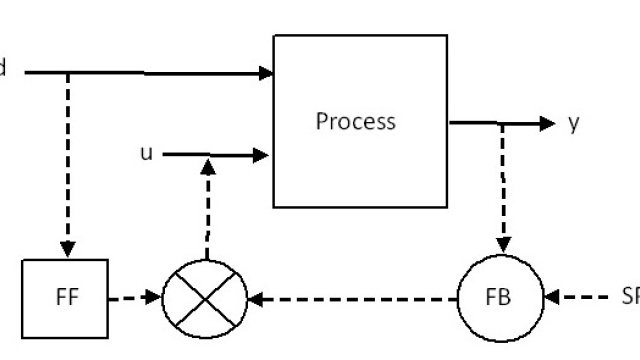
Feedforward Control
15 min
Intermediate
Article / Blog
Application
When and how to use feedforward control
See More
Lecture 26: Stability examples, GM and PM using Nyquist Stability Criterion
56 min
Beginner
Video
Theory