

Control Systems in Practice, Part 10: Nichols Chart, Nyquist Plot, and Bode ...
18 min
Beginner
Video
Theory
Explore three popular methods to visualize the frequency response of a linear time-invariant (LTI) system: the Nichols chart, the Nyquist plot, and the Bode plot. Learn about each method...
See More
An introduction to Beamforming
14 min
Beginner
Video
Theory
This video talks about how we actually have more control over the shape of the beam than just adding additional elements, or adjusting the position and orientation of the elements. We can...
See More
An Introduction to the Kalman Filter
45 min
Beginner
Article / Blog
Theory
The purpose of this paper is to provide a practical introduction to the discrete Kalman filter. This introduction includes a description and some discussion of the basic discrete Kalman...
See More
Reinforcement Learning for Engineers, Part 4: The Walking Robot Problem
14 min
Beginner
Video
Theory
This video shows how to use the reinforcement learning workflow to get a bipedal robot to walk. It also looks at how to modify the default example to make it look more like how one would set...
See More
Understanding Sensor Fusion and Tracking, Part 1: What Is Sensor Fusion?
12 min
Beginner
Video
Theory
This video provides an overview of what sensor fusion is and how it helps in the design of autonomous systems. It also covers a few scenarios that illustrate the various ways that sensor...
See More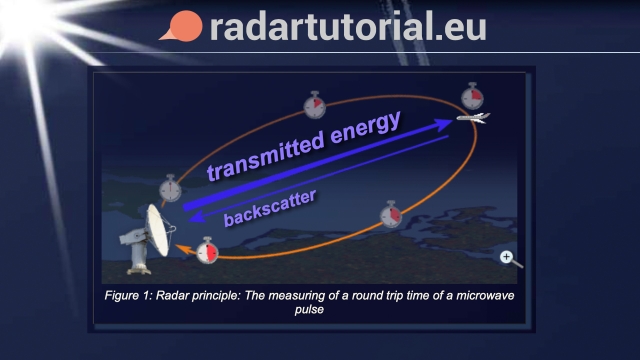
Radar Tutorial (English)
Beginner
Article / Blog
Theory
This page provides a detailed overview of radar principles and technologies, including mathematical, physical and technical explanations. “Radartutorial” explains the fundamentals of radar...
See More
Stanford Engineering Everywhere: CS223A - Introduction to Robotics
Beginner
Course
Theory
The purpose of this course is to introduce you to basics of modeling, design, planning, and control of robot systems. In essence, the material treated in this course is a brief survey of...
See More
Autonomous Navigation, Part 2: Understanding the Particle Filter
16 min
Beginner
Video
Theory
This video presents a high-level understanding of the particle filter and shows how it can be used in Monte Carlo localization to determine the pose of a mobile robot inside a building. We...
See More
Free Video Course in Radar Systems Engineering
Beginner
Course
Theory
This Free Radar Systems Engineering Course (video, audio and screen captured ppt slides) and separate pdf slides) has been developed as a first course in Radar Systems for first year...
See More
Discrete Fourier Transform
Intermediate
Article / Blog
Theory
The discrete Fourier transform, or DFT, is the primary tool of digital signal processing. The foundation of the product is the fast Fourier transform (FFT), a method for computing the DFT...
See More")
Machine Learning Control: Tuning a PID Controller with Genetic Algorithms (P...
9 min
Beginner
Video
Theory
This lecture shows how to use genetic algorithms to tune the parameters of a PID controller. Tuning a PID controller with genetic algorithms is not generally recommended, but is used to...
See More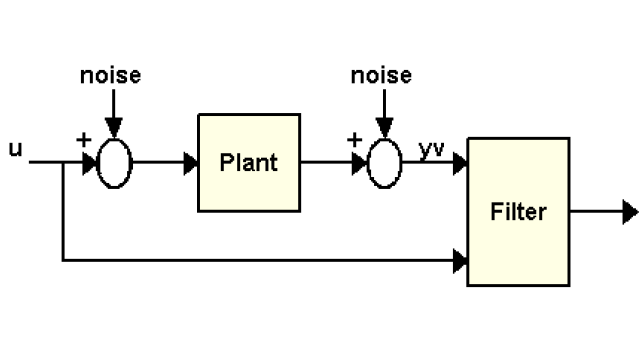
Kalman Filter Design
30 min
Intermediate
Article / Blog
Application
This example shows how to perform Kalman filtering. Both a steady state filter and a time varying filter are designed and simulated.
See More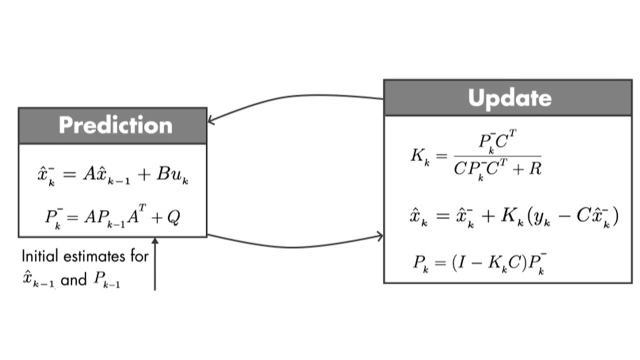
Understanding Kalman Filters, Part 4: An Optimal State Estimator Algorithm
9 min
Beginner
Video
Theory
Discover the set of equations you need to implement a Kalman filter algorithm. You’ll learn how to perform the prediction and update steps of the Kalman filter algorithm, and you’ll see how...
See More
Control Systems in Practice, Part 7: 4 Ways to Implement a Transfer Function...
18 min
Beginner
Video
Theory
In some situations, it is easier to design a controller or a filter using continuous, s-domain transfer functions. We have a lot of mathematical tools that make analyzing and manipulating...
See More
Introduction to Noise Filtering
20 min
Intermediate
Article / Blog
Application
Introduction to filtering - moving average, first-order, anti-aliasing, set point softening
See More
What's a Control System and Why Should I Care? A whirlwind tour through the ...
60 min
Beginner
Article / Blog
Theory
This paper aims to provide some introduction, a cheat sheet, and some context for college level STEM students about to take that first controls class. In some cases, it provides context...
See More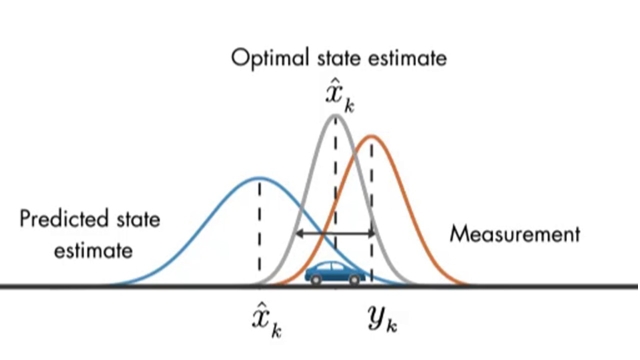
Understanding Kalman Filters, Part 3: An Optimal State Estimator
7 min
Beginner
Video
Theory
Watch this video for an explanation of how Kalman filters work. Kalman filters combine two sources of information, the predicted states and noisy measurements, to produce optimal, unbiased...
See More
The Radar Equation | Understanding Radar Principles
Beginner
Video
Theory
Learn how the radar equation combines several of the main parameters of a radar system in a way that gives you a general understanding of how the system will perform. The radar equation is a...
See More
Z-Transform - Practical Applications
26 min
Intermediate
Video
Application
Covering practical applications of the Z-transform used in digital signal processing, for example, stability analysis and frequency response of discrete-time systems. Theory, C code, and...
See More
Modeling Physical Systems, An Overview
7 min
Beginner
Video
Theory
This video sets the stage for the topics that I want to cover over the next month or two. This is an overview of how you go from a physical system to a linear model where you can design a...
See More
What Are Dynamic Models? Chapter 1 from Dynamic Models in Biology
Beginner
Book
Theory
Throughout this book we use a wide-ranging set of case studies to illustrate different aspects of models and modeling. In this introductory chapter we describe and give examples of different...
See More
Understanding Kalman Filters, Part 2: State Observers
8 min
Beginner
Video
Theory
Learn the working principles of state observers, and discover the math behind them. State observers are used for estimating the internal states of a system when you can’t directly measure...
See More
Understanding PID Control, Part 6: Manual and Automatic Tuning Methods
13 min
Beginner
Video
Theory
The previous video showed three different approaches to developing a mathematical model of your physical system. Now that we have this model, we can use it to tune a PID controller that will...
See More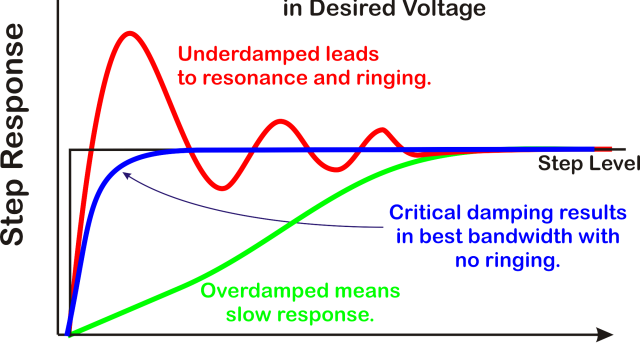
Introducing Feedback Control to Middle and High School STEM Students, Part 2...
60 min
Intermediate
Article / Blog
Demonstration
This paper was presented at the 2019 IFAC Advances on Control Education Conference (IFAC-ACE), Philadelphia, PA, USA, July 7-9, 2019, and is in the conference proceedings. This paper aims at...
See More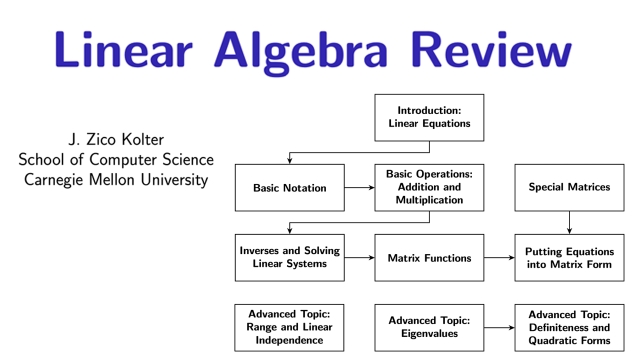
Linear Algebra Review
Intermediate
Course
Theory
This short course is a quick review of linear algebra, intended for students who have already taken a previous course in linear algebra or have some experience with vectors and matrices. The...
See More