


Overview of Dempster-Shafer Theory (Evidence Theory)
Beginner
Article / Blog
Theory
This is an overview of Dempster-Shafer Theory (Evidence Theory) that provides an introduction, definition, basic information about combination rules, some issues with the theory, and the...
See More
Machine Learning - Andrew Ng, Stanford University
Beginner
Video
Theory
Machine learning is the science of getting computers to act without being explicitly programmed. In the past decade, machine learning has given us self-driving cars, practical speech...
See More control")
Control Bootcamp: Cruise Control Example with Proportional-Integral (PI) co...
23 min
Beginner
Video
Theory
In this video, we show that introducing integral control reduces the steady-state tracking error to zero in the cruise control example. We also use a more sophisticated model for the...
See More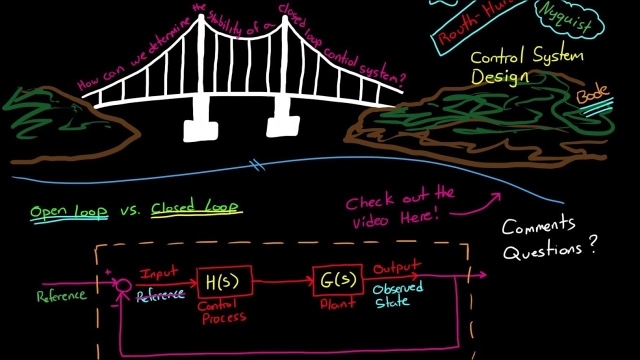
Stability of Closed Loop Control Systems
11 min
Beginner
Video
Theory
This video explains why we need design tools like the Routh-Hurwitz Criterion, Bode Plots, Nyquist Plots, and Root Locus. This is an introduction into the difficulties of determining the...
See More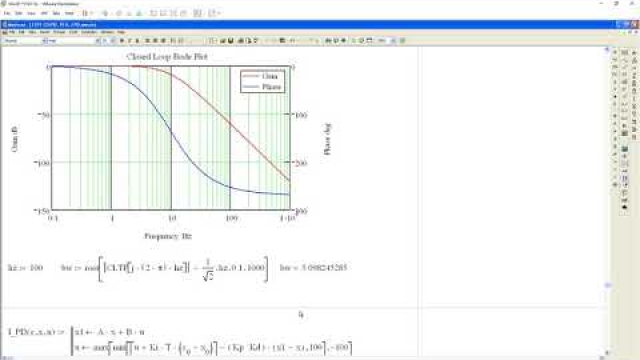
Peter Ponders PID - Closed Loop Zeros
13 min
Beginner
Video
Theory
This video covers closed loop zeros, what causes zeros and the benefits and drawbacks of closed loop zeros.
See More![Reachability and Controllability with Cayley-Hamilton [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_306.jpg?itok=SzmzyZ6Z)
Reachability and Controllability with Cayley-Hamilton [Control Bootcamp]
10 min
Beginner
Video
Theory
Here we use the Cayley-Hamilton Theorem to show that the full state space is reachable if and only if the system is controllable.
See More
Peter Ponders PID- Motor position control
16 min
Beginner
Video
Theory

The Root Locus Method - Introduction
13 min
Beginner
Video
Theory
This Root Locus method is a fantastic way of visualizing how the poles of a system move through the S-plane when a single system parameter is varied from 0 to infinity. I show how to...
See More
Trimming a Simulink Model Using the Linear Analysis Tool
68 min
Beginner
Video
Application
In this video we show how to use the Linear Analysis Tool to trim a non-linear Simulink model. This is also known as finding an operating point or an equili...
See More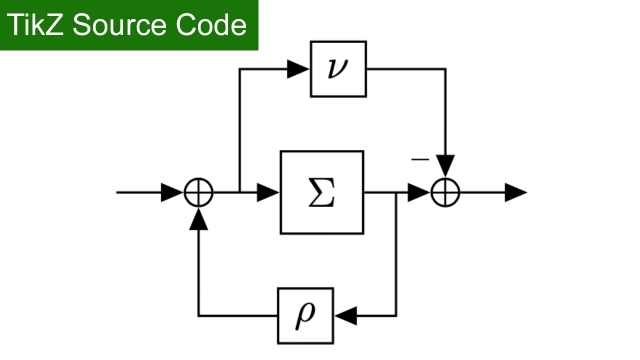
TikZ source Code: Both passivity indices applied
Beginner
Source Code
Application
TikZ source Code: Both passivity indices applied.
See More![Denoising Data with FFT [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_358.jpg?itok=BSMOuW9N "Denoising Data with FFT [Matlab]")
Denoising Data with FFT [Matlab]
10 min
Beginner
Video
Application
This video describes how to clean data with the Fast Fourier Transform (FFT) in Matlab.
See More
Control System with MATLAB - Block Diagram Reduction
32 min
Beginner
Video
Theory
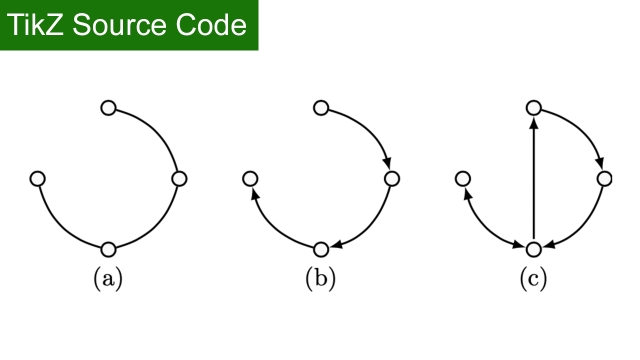
TikZ source Code: Example Graph
Beginner
Source Code
Application
TikZ source Code: Example Graph
See More
The Fourier Transform
14 min
Beginner
Video
Theory
This video will discuss the Fourier Transform, which is one of the most important coordinate transformations in all of science and engineering.
See More
Resonant Frequency of a Dynamic System
29 min
Beginner
Video
Theory
In this video we discuss the resonant frequency of a dynamic system. We show how the resonant frequency, natural frequency, and damped natural frequency are...
See More
Into Stability: Walter R Evans and the Story of Root Locus
Beginner
Book
Theory
In the aftermath of World War II, engineers faced challenges their slide rules couldn’t solve. Walter R. Evans wasn’t looking to change the world—he just wanted to help engineers see clearly...
See More
What Is a Control System and Why Should I Care? (Part 1)
38 min
Beginner
Video
Application
This talk introduces the basic concepts of feedback with lots of visual examples.
See More
Lecture 31: Time response, Controllability and Observability
33 min
Beginner
Video
Theory

Solving the 1D Heat Equation
47 min
Beginner
Video
Theory
In this video we simplify the general heat equation to look at only a single spatial variable, thereby obtaining the 1D heat equation. We solving the result...
See More
Lecture 19: Lead and PD compensator Design using Root Locus
54 min
Beginner
Video
Theory

Time domain - tutorial 11: system properties from impulse response
13 min
Beginner
Video
Theory
In this video, we learn how to find system properties from the impulse response. Specifically, memoryless, causal, stable and invertible systems will be ful...
See More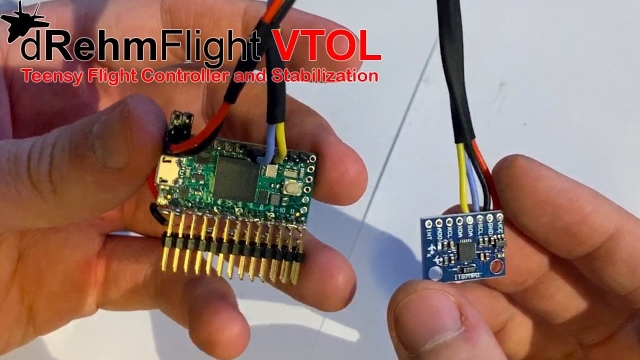
Building the Flight Controller Hardware - dRehmFlight VTOL
11 min
Beginner
Video
Application
This video will show you how to setup and solder the default recommended hardware setup for the dRehmFlight VTOL flight controller package. This hardware configuration will work with the...
See More
Machine Learning Control: Genetic Programming
12 min
Beginner
Video
Theory
This lecture explores the use of genetic programming to simultaneously optimize the structure and parameters of an effective control law.
See More
Posicast Control 4 - ( In English )
12 min
Beginner
Video
Theory
This video continues to explore the gantry crame control simulations in open-loop- The main focus is the half-cycle Posicast.
See More
Finding Transfer Functions from Response Graphs
9 min
Beginner
Video
Theory
Given a system response to a unit step change, in this video I'll cover how we can derive the transfer function so we can predict how our system will respond...
See More