
A mathematical model is a description of a system using mathematical concepts and language. The process of developing a mathematical model is termed mathematical modeling. Mathematical models are used in the natural sciences (such as physics, biology, earth science, chemistry) and engineering disciplines (such as computer science, electrical engineering), as well as in non-physical systems such as the social sciences (such as economics, psychology, sociology, political science). Mathematical models are also used in music, linguistics and philosophy (for example, intensively in analytic philosophy).
Topic
Modeling (Dynamics)
This topic includes the following resources and journeys:
Filters
Type
Experience
Scope
28 items
What Are Dynamic Models? Chapter 1 from Dynamic Models in Biology
Beginner
Book
Theory
Throughout this book we use a wide-ranging set of case studies to illustrate different aspects of models and modeling. In this introductory chapter we describe and give examples of different...
See More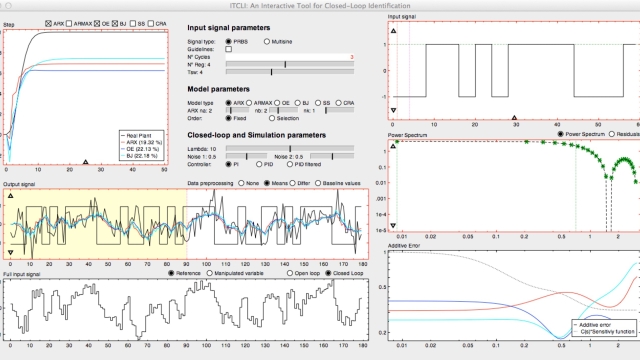
ITCLI: An Interactive Tool for Closed-Loop Identification
Intermediate
App
Application
The Interactive Tool for Closed-Loop Identification (ITCLI) is an interactive software tool for understanding SISO closed-loop identification using prediction-error techniques. The tool...
See More
Modeling Physical Systems, An Overview
7 min
Beginner
Video
Theory
This video sets the stage for the topics that I want to cover over the next month or two. This is an overview of how you go from a physical system to a linear model where you can design a...
See More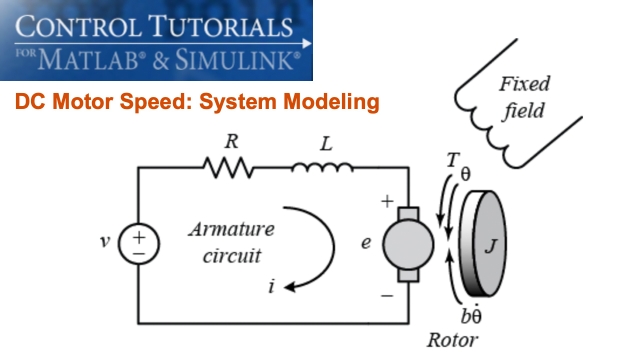
DC Motor Speed: System Modeling
Beginner
Project
Theory
This examples walks through modeling a simple DC motor in MATLAB.
See More
Manuscript about ITISE: an Interactive Software Tool for System Identificati...
Intermediate
Peer Reviewed Paper
Theory
The paper describes the conceptual basis, main features and functionality of an interactive software tool developed in support of system identification education and discovery.
This...
See More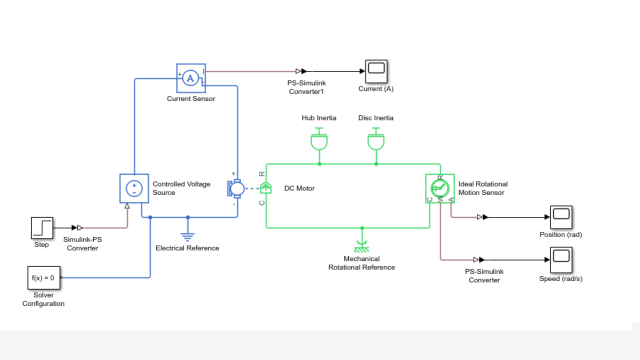
Using Simscape™ to Model a Quanser QUBE-Servo 2 with Friction
15 min
Intermediate
Article / Blog
Theory
Modelling a DC servomotor is one of the common examples used in control system textbooks and courses. Given that so many systems use DC motors, e.g. robot manipulator arms, it’s an important...
See More
Creating Discrete-Time Models
Intermediate
Example
Theory
This MATLAB example shows how to create discrete-time linear models using the tf, zpk, ss, and frd commands.
Perspectives on Control-Relevant Identification Through the Use of Interacti...
Intermediate
Peer Reviewed Paper
Theory
This paper presents a control-relevant identification methodology through an intuitive interactive tool called "Interactive Tool for Control Relevant Identification (ITCRI)". ITCRI...
See More
Autodesk Tinkercad
Beginner
App
Application
Tinkercad is a free, easy-to-use web app that equips the next generation of designers and engineers with the foundational skills for innovation: 3D design, electronics, and coding!
See More
Averaging Methods in Nonlinear Dynamical Systems
Intermediate
Book
Theory
Perturbation theory and in particular normal form theory has shown strong growth during the last decades. So it is not surprising that the authors have presented an extensive revision of the...
See More
Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields...
Beginner
Book
Theory
From the reviews: "This book is concerned with the application of methods from dynamical systems and bifurcation theories to the study of nonlinear oscillations. Chapter 1 provides a review...
See More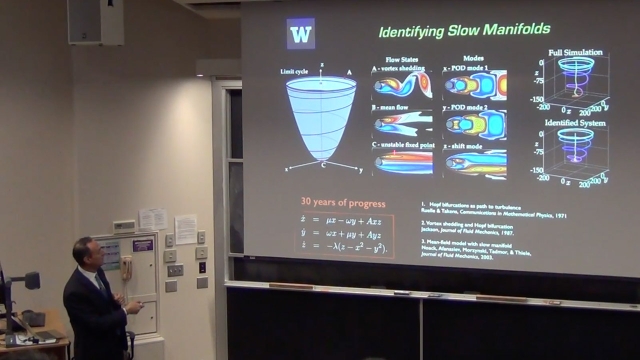
Nathan Kutz:"Data-driven Discovery of Governing Physical Laws"
73 min
Intermediate
Video
Theory
Seminar by Dr.Nathan Kutz on "Data-driven Discovery of Governing Physical Laws" on 10/31/2018 CICS Seminar Series
See More
Educational Tool for Teaching GRAFCET
Intermediate
App
Application
e-GRAFCET is a tool for supporting the teaching-learning process of GRAFCET ( which can be implemented using the programming language Sequential Function Chart – SFC). While this tool was...
See More
Second Order Dynamics Example
4 min
Beginner
Video
Theory
How will a second order process respond in the time domain when subjected to a unit step input? What other behaviors can we expect to see and why? Tune in to...
See More
Trimming a Model of a Dynamic System Using Numerical Optimization
60 min
Beginner
Video
Theory
In this video we show how to find a trim point of a dynamic system using numerical optimization techniques. We generate a cost function that corresponds to ...
See More
Simulating the Logistic Map in Matlab
16 min
Intermediate
Video
Application
This video shows how simple it is to simulate discrete-time dynamical systems, such as the Logistic Map, in Matlab.
See More
Second Order Dynamics
3 min
Beginner
Video
Theory
A crash course overview on second order dynamics in the frequency domain, what the key parameters are, and why they matter.
See More
Equations of Motion for a Planar Vehicle
43 min
Beginner
Video
Theory
In this video we outline equations of motion for a simple planar vehicle. This model is suitable for vehicles such as boats or hovercraft that that are rest...
See More
Second Order Dynamics in Process Control
17 min
Beginner
Video
Theory
How do we simulate two first order transfer functions in series, a inherently second order system, or two coupled differential equations? Tune in to find out!
See More
First Order Dynamics in Process Control
15 min
Beginner
Video
Theory
An overview on the identification and behavior of first order dynamics in process control.
See More
Discrete-Time Dynamical Systems
9 min
Intermediate
Video
Theory
This video shows how discrete-time dynamical systems may be induced from continuous-time systems.
See More
Manipulating Aerodynamic Coefficients
25 min
Beginner
Video
Theory
In this video we discuss some potential problems you may encounter when attempting to perform operations with dimensionless aerodynamic coefficients such as ...
See More
Dynamic Behavior and Input Types in Process Control
13 min
Beginner
Video
Theory
An introduction to the four types of dynamic behavior and five types of inputs (step, ramp, pulse, impulse, and sinusoidal), and why transfer functions are u...
See More
Predicting Second Order Transfer Function Behavior
4 min
Beginner
Video
Theory
Given a second order transfer function, I'll cover how we can predict the system behavior and derive the appropriate time constants and damping coefficient.
See More")
A Nonlinear, 6 DOF Dynamic Model of an Aircraft: the Research Civil Aircraft...
103 min
Beginner
Video
Theory
In this video we develop a dynamic model of an aircraft by describing forces and moments generated by aerodynamic, propulsion, and gravity that act on the ai...
See More