
An unmanned aerial vehicle (UAV) (or uncrewed aerial vehicle, commonly known as a drone) is an aircraft without a human pilot on board. UAVs are a component of an unmanned aircraft system (UAS); which include a UAV, a ground-based controller, and a system of communications between the two. The flight of UAVs may operate with various degrees of autonomy: either under remote control by a human operator or autonomously by onboard computers referred to as an autopilot.
Topic
Drone Control
This topic includes the following resources and journeys:
Filters
Type
Experience
Scope
13 items

Drone Simulation and Control, Part 1: Setting Up the Control Problem
14 min
Beginner
Video
Theory
Quadcopters and other styles of drones are extremely popular, partly because they have sophisticated programmed control systems that allow them to be stable and fly autonomously with very...
See More
How I put the Google Maps Algorithm on my Autonomous Drone
13 min
Intermediate
Video
Application
This fully autonomous drone has an onboard computer ‘brain’, camera ‘eyes’, and an algorithm that generates the fastest path around unknown obstacles as they’re detected mid-flight. Let’s...
See More
Drone Simulation and Control, Part 5: Tuning the PID controller
14 min
Beginner
Video
Theory
In the last video, we learned how accurate, nonlinear models are great for simulation but they don’t lend themselves well to linear analysis and design. This video takes the nonlinear model...
See More
Drone Simulation and Control, Part 4: How to Build a Model for Simulation
11 min
Beginner
Video
Theory
This video describes how a good model of the drone and the environment it operates in can be used for simulation and test. It shows how nonlinear and linear models are both needed for...
See More
Setting Up Your Radio Connection - dRehmFlight VTOL
4 min
Beginner
Video
Application
This video will show you how to set up your radio to work with dRehmFlight VTOL. The code supports PWM, PPM, and SBUS type receivers, allowing you to connect and use 6 channels within the...
See More
dRehmFlight VTOL - Teensy (Arduino) Flight Controller and Stabilization
5 min
Beginner
Video
Application
dRehmFlight VTOL is a new flight controller and stabilization package intended to be used for small to medium sized hobby or research projects. dRehmFlight is the code, and the physical...
See More
Drone Simulation and Control, Part 3: How to Build the Flight Code
18 min
Beginner
Video
Theory
This video describes how to create quadcopter flight software from the control architecture developed in the last video. It covers how to process the raw sensor readings and use them with...
See More
Mounting and Configuring the IMU - dRehmFlight VTOL
4 min
Beginner
Video
Application
This video will show you how to verify proper operation of the IMU for dRehmFlight VTOL before your first flight. It will also show you how to correctly mount the IMU to your aircraft. The...
See More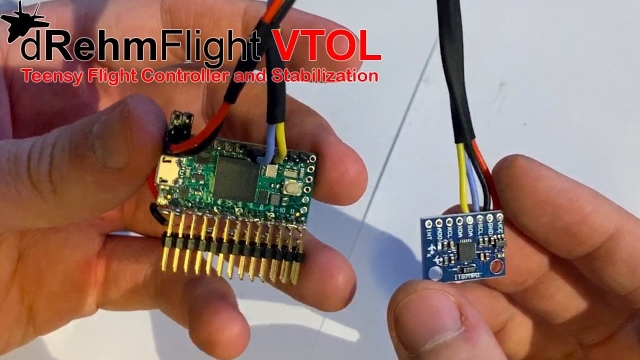
Building the Flight Controller Hardware - dRehmFlight VTOL
11 min
Beginner
Video
Application
This video will show you how to setup and solder the default recommended hardware setup for the dRehmFlight VTOL flight controller package. This hardware configuration will work with the...
See More
Drone Simulation and Control, Part 2: How Do You Get a Drone to Hover?
13 min
Beginner
Video
Theory
In the last video, we showed we can manipulate the four motors of a quadcopter to maneuver it in 3D space by getting it to roll, pitch, yaw, and change its thrust. We also covered the four...
See More
How the Flight Controller Code Works - dRehmFlight VTOL
20 min
Intermediate
Video
Application
This video will walk you through the flight controller code of dRehmFlight VTOL to give you a better understanding of the contents and structure. The hope is that it will cover almost...
See More
Making an INSANE Hovering RC F-35 VTOL
21 min
Beginner
Video
Application
I built this insane radio controlled VTOL F-35 parkjet that can takeoff and land vertically using conventional miniquad/drone parts. The best part is the plans and code are all free, and I’m...
See More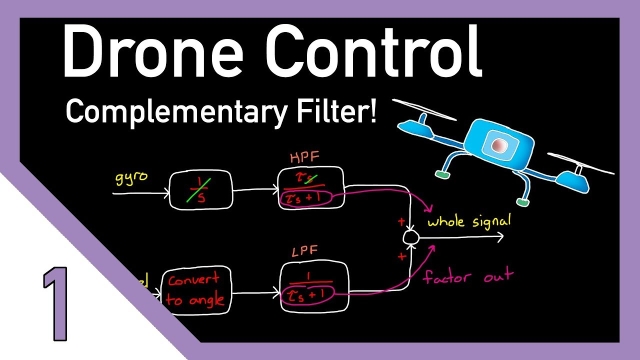
Drone Control and the Complementary Filter
11 min
Beginner
Video
Theory
Let's talk about the complementary filter and how we can use it to estimate the attitude of a drone using an IMU. It is such a dead simple filter, which is a good reason to learn it, but it...
See More