

Why Do Radars Chirp? | Pulse Waveform Basics
Beginner
Video
Theory
This tech talk covers how different pulse waveforms affect radar and sonar performance. See the difference between a rectangular pulse and a linear frequency modulated pulse, as well as...
See More
Machine Learning: What is easy, medium, and hard?
38 min
Beginner
Video
Theory
This video gives a brief overview of what is easy, medium, and hard in machine learning, explored through case studies. Progress in machine learning is rapidly advancing, and changing the...
See More![Pole Placement for the Inverted Pendulum on a Cart [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_490.jpg?itok=qWteM4RS "Pole Placement for the Inverted Pendulum on a Cart [Control Bootcamp]")
Pole Placement for the Inverted Pendulum on a Cart [Control Bootcamp]
12 min
Beginner
Video
Theory
Here we use the 'place' command in Matlab to design full-state feedback gains to specify the eigenvalues of the closed-loop system. This is demonstrated on the inverted pendulum on a cart.
See More
Converting Constrained Optimization to Unconstrained Optimization Using the ...
54 min
Beginner
Video
Theory
In this video we show how to convert a constrained optimization problem into an approximately equivalent unconstrained optimization problem using the penalty...
See More
Learning Dynamic Systems & Control Engineering with a Video Game
Intermediate
Video
Demonstration
Engineering Students at Northern Illinois University are learning one of their core subjects, Dynamic Systems & Control, with the aid of a video game.
See More
Wind Tunnel Testing: Introduction and Data Acquisition
28 min
Intermediate
Video
Theory
This is the first of our 3 part series on wind tunnel testing. In this video, we introduce the concept of wind tunnel testing as well as discuss the process for acquiring aerodynamic data in...
See More
A Tutorial on PES Pareto Methods for Analysis of Noise Propagation in Feedba...
48 min
Intermediate
Video
Theory
This is the recorded talk of the paper by the same title.
See More
System Identification: Full-State Models with Control
10 min
Intermediate
Video
Theory
This lecture provides an overview of modern data-driven regression methods for linear and nonlinear system identification, based on the dynamic mode decomposition (DMD), Koopman theory, and...
See More
Control Bootcamp: LQG Example in Matlab
13 min
Beginner
Video
Theory
This video combines the LQR and Kalman filter in Matlab on the example of an inverted pendulum on a cart. We stabilize the full nonlinear system with a measurement of a single variable (the...
See More
Minami's Control School (Japanese)
Beginner
Video
Theory
教員のみなみゆうきです.専門は制御工学です.制御工学は「モノの動きをデザインする科学」です.制御工学を勉強したいという方に,僕の知識をすこしでも届けられると良いなと思い,YouTubeをやっています.
2019年の秋,講義ノートの作成の様子を撮影し,YouTubeに動画をアップロードしたのを契機として,動画作成をはじめました...
See More
Control Bootcamp: Overview
19 min
Beginner
Video
Theory
Overview lecture for bootcamp on optimal and modern control. In this lecture, we discuss the various types of control and the benefits of closed-loop feedback control.
See More![Principal Component Analysis (PCA) 2 [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_494.jpg?itok=Q2x6S-Uj "Principal Component Analysis (PCA) 2 [Python]")
Principal Component Analysis (PCA) 2 [Python]
7 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used for principal component analysis (PCA) in Python (part 2).
See More
What Is a Control System and Why Should I Care? (Part 2)
34 min
Beginner
Video
Demonstration
This second video introduces some of the methods that engineers use to build control systems. It shows how we use science to help us derive models of systems from both measurements and...
See More
What are Phased Arrays?
17 min
Beginner
Video
Theory
This video introduces the concept of phased arrays. An array refers to multiple sensors, arranged in some configuration, that act together to produce a desired sensor pattern. With a phased...
See More
Autonomous Navigation, Part 3: Understanding SLAM Using Pose Graph Optimizat...
16 min
Beginner
Video
Theory
This video provides some intuition around Pose Graph Optimization—a popular framework for solving the simultaneous localization and mapping (SLAM) problem in autonomous navigation.
We’ll...
See More
A* Pathfinding (E01: algorithm explanation)
12 min
Beginner
Video
Theory
Welcome to the first part in a series teaching pathfinding for video games. In this episode we take a look at the A* algorithm and how it works.
See More
Intro to Data Science: Answering Questions with Data
6 min
Beginner
Video
Theory
This lecture describes the central aspect of data science: asking and answering questions with data. In particular, we discuss the thought process and progression of questions one might ask...
See More
Respect the Unstable
71 min
Beginner
Video
Theory
An understanding of fundamental limitations is an essential element in all engineering. Shannon's early results on channel capacity have always had center court in signal processing...
See More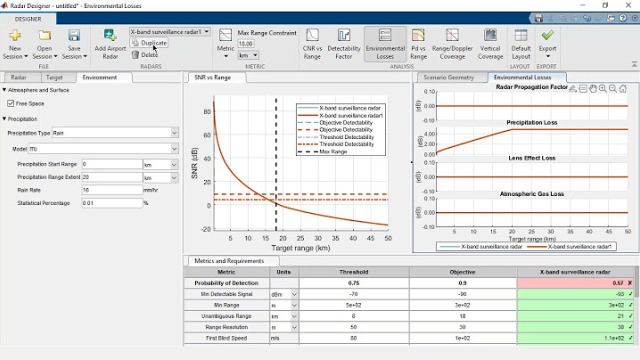
Radar Design with the Radar Designer App
5 min
Beginner
Video
Theory
The Radar Designer app is an interactive tool that assists engineers and system analysts with high-level design and assessment of radar systems at the early stage of radar development.
See More
DSP Lecture 1: Signals
66 min
Beginner
Video
Theory
This is a video lecture for ECSE-4530 Digital Signal Processing by Rich Radke, Rensselaer Polytechnic Institute.
See More
Reinforcement Learning for Engineers, Part 5: Overcoming the Practical Chall...
16 min
Beginner
Video
Theory
This video addresses a few challenges that occur when using reinforcement learning for production systems and provides some ways to mitigate them. Even if there aren’t straightforward ways...
See More
TCLab: An Inexpensive Experimental Platform for Students to Learn Feedback
5 min
Beginner
Video
Demonstration
The temperature control lab (TCLab) reinforces process feedback control with real data. The TCLab hardware consists of an Arduino® shield that fits onto a standard Arduino Leonardo...
See More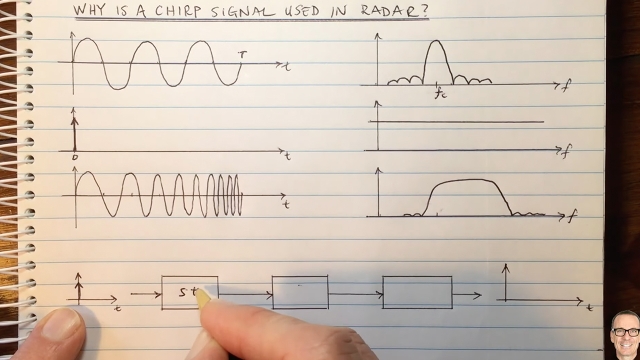
Why is a Chirp Signal used in Radar?
7 min
Beginner
Video
Theory
Gives an intuitive explanation of why the Chirp signal is a good compromise between an impulse waveform and a sinusoidal pulse waveform for radar.
See More
Systems Engineering, Part 5: Some Benefits of Model-Based Systems Engineerin...
12 min
Beginner
Video
Theory
Learn how model-based systems engineering (MBSE) can help you cut through the chaos of early systems development and get you from definition to execution more seamlessly.
You’ll hear the...
See More
Projectile Motion Practice Problems
28 min
Intermediate
Video
Application
In this video, practice along questions on an important topic of Kinematics i.e Projectile Motion. Practicing would help you remember the concepts and also understand them better.
See More