

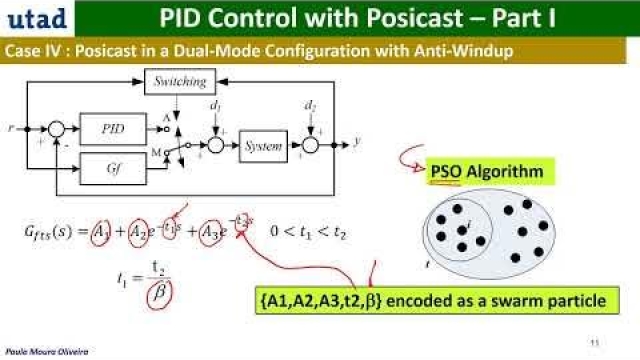
PID Control with Posicast 7 - ( In English )
12 min
Beginner
Video
Theory
In this video closed-loop configurations with PID controllers and Posicast are introduced.
See More
Understanding Sensor Fusion and Tracking, Part 2: Fusing a Mag, Accel, and G...
16 min
Beginner
Video
Theory
This video describes how we can use a magnetometer, accelerometer, and a gyro to estimate an object’s orientation. The goal is to show how these sensors contribute to the solution, and to...
See More
Lecture 30: Canonical Forms
40 min
Beginner
Video
Theory

Frequency domain – tutorial 11: equalization
11 min
Beginner
Video
Theory
In this video, we learn about equalization technique which is used in communication systems to compensate for the destructive effect of the channel between t...
See More
IMC PID Design of a Second Order Process
8 min
Beginner
Video
Theory
IMC PID Design of a Second Order Process
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 1 - Introduct...
66 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group
Bode Plots by Hand: Poles and Zeros at the Origin
8 min
Beginner
Video
Theory
This is a continuation of the Control Systems Lectures. This video describes the benefit of being able to approximate a Bode plot by hand and explains what a Bode plot looks like for a...
See More
Second Order Dynamics
3 min
Beginner
Video
Theory
A crash course overview on second order dynamics in the frequency domain, what the key parameters are, and why they matter.
See More
RL Course by David Silver - Lecture 7: Policy Gradient Methods
94 min
Intermediate
Video
Theory
Looks at different policy gradients, including Finite Difference, Monte-Carlo and Actor Critic.
See More
Digital Twins
8 min
Beginner
Video
Theory
This lecture discusses the use of data-driven digital twins in advanced model-based design and engineering, and the related digital thread, which ties together the data throughout an entire...
See More
Using a Homogeneous Transformation Matrix to Combine Rotation and Translatio...
63 min
Beginner
Video
Theory
In this video we discuss how to properly deal with coordinate frames that are both rotated and translated from one another. We develop a homogeneous transfo...
See More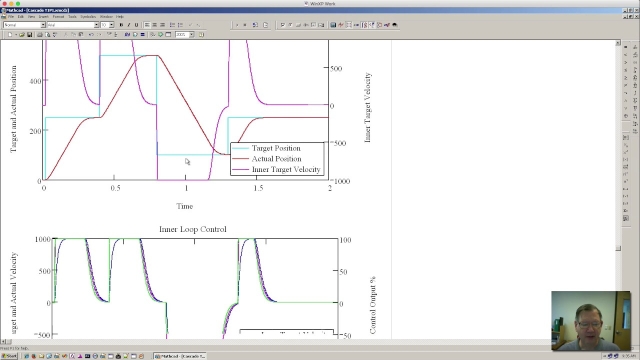
Peter Ponders PID - Cascade Control Part2
14 min
Beginner
Video
Theory
The inner loop pole locations and gains are calculated first so the inner loop pole locations are determined by the user. The outer loop poles are still pla...
See More
Routh-Hurwitz Criterion, Beyond Stability
11 min
Beginner
Video
Theory
This video explains of few uses of the Routh-Hurwitz Criterion that go beyond simply determining how many poles exist in the right half plane. I cover how to determine gain margin and how...
See More
Extremum Seeking Control: Challenging Example
8 min
Intermediate
Video
Theory
This lecture explores the use of extremum-seeking control (ESC) to solve a challenging control problem with a right-half plane zero.
See More
The Routh-Hurwitz Stability Criterion
82 min
Beginner
Video
Theory
In this video we explore the Routh Hurwitz Stability Criterion and investigate how it can be applied to control systems engineering. The Routh Hurwitz Stabi...
See More with Smith Predictor")
SOPDT Sliding Mode Control ( SMC ) with Smith Predictor
6 min
Beginner
Video
Theory

Identifying Dominant Balance Physics from Data - Jared Callaham
12 min
Intermediate
Video
Theory
This video illustrates a new algorithm to identify local dominant physical balance relations from multiscale spatiotemporal data.
See More
Solving the Heat Equation with the Fourier Transform
11 min
Beginner
Video
Theory
This video describes how the Fourier Transform can be used to solve the heat equation. In fact, the Fourier transform is a change of coordinates into the eigenvector coordinates for the...
See More
Relationship Between Poles and Performance of a Dynamic System
43 min
Beginner
Video
Theory
In this video we establish the relationship between pole locations and associated performance of a dynamic system. This relationship is useful to translate ...
See More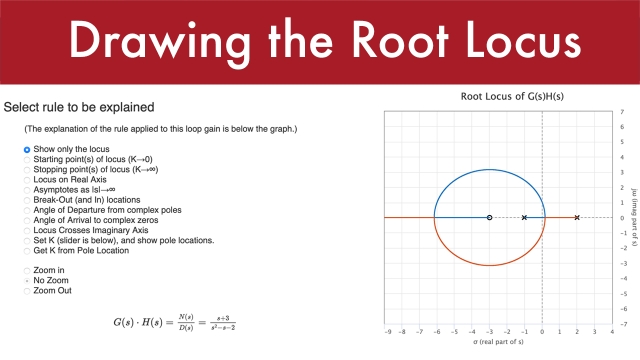
Drawing the root locus (Interactive Tool)
Beginner
App
Theory
This page was developed to help student learn how to sketch the root locus by hand. You can enter a numerator and denominator for G(s)H(s) (i.e., the loop gain) and the program will guide...
See More
Lecture 12: Steady state error
26 min
Beginner
Video
Theory

Derivation of the Heat Equation
31 min
Beginner
Video
Theory
In this video, we derive the heat equation. This partial differential equation (PDE) applies to scenarios such as the transfer of heat in a uniform, homogen...
See More![Cayley-Hamilton Theorem [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_395.jpg?itok=Xi08rPqq "Cayley-Hamilton Theorem [Control Bootcamp]")
Cayley-Hamilton Theorem [Control Bootcamp]
6 min
Beginner
Video
Theory
Here we describe the Cayley-Hamilton Theorem, which states that every square matrix satisfies its own characteristic equation. This is very useful to prove results related to...
See More
Lecture 26: Stability examples, GM and PM using Nyquist Stability Criterion
56 min
Beginner
Video
Theory

Frequency domain – tutorial 2: Fourier series
25 min
Beginner
Video
Theory
In this video, we learn Fourier series which enables us to travel from time to the frequency domain when a signal is periodic. The following materials are co...
See More