

Introducing Feedback Control to Middle and High School STEM Students, Part 2...
60 min
Intermediate
Article / Blog
Demonstration
This paper was presented at the 2019 IFAC Advances on Control Education Conference (IFAC-ACE), Philadelphia, PA, USA, July 7-9, 2019, and is in the conference proceedings. This paper aims at...
See More
Introducing Feedback Control to Middle and High School STEM Students, Part 1...
60 min
Intermediate
Article / Blog
Demonstration
This paper was presented at the 2019 IFAC Advances on Control Education Conference (IFAC-ACE), Philadelphia, PA, USA, July 7-9, 2019, and is in the conference proceedings. This paper aims at...
See More
Resonance in Nature and Bioinspired Squid Robots
18 min
Beginner
Video
Demonstration
Bioinspired robots combine the best of both biology and engineering. Using tools learned from nature, we can build squid-like and other squishy robots to improve current capabilities in...
See More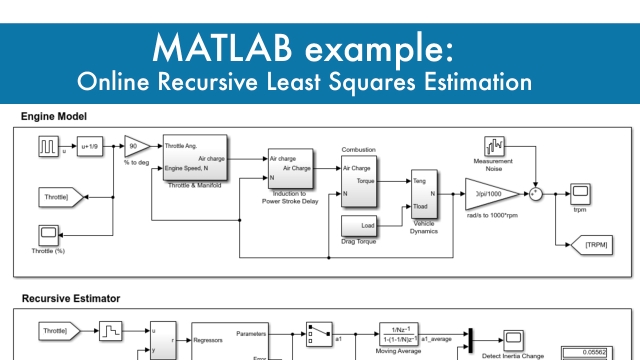
MATLAB Example: Online Recursive Least Squares Estimation
Intermediate
Project
Demonstration
This example shows how to implement an online recursive least squares estimator. You estimate a nonlinear model of an internal combustion engine and use recursive least squares to detect...
See More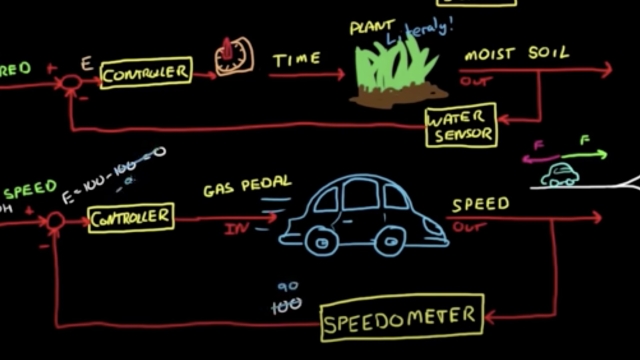
Understanding Closed-Loop Control
9 min
Beginner
Video
Demonstration
This lecture discusses the differences between open loop and closed loop control in a very easy and intuitive way. Daily examples, like a dishwasher, plant irrigation, and car speed systems...
See More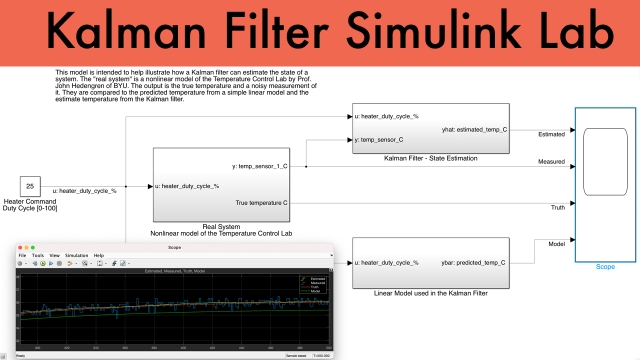
Kalman Filter Simulink 2022A example
Intermediate
Virtual Lab
Demonstration
This model is intended to help illustrate how a Kalman filter can estimate the state of a system. The "real system" is a nonlinear model of the Temperature Control Lab by Prof. John...
See More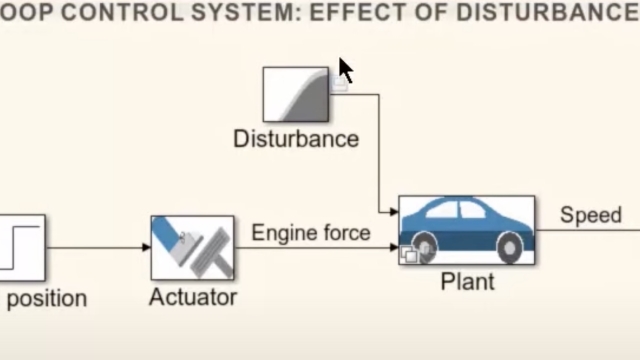
Understanding Control Systems: The Disturbance Rejection Problem
6 min
Beginner
Video
Demonstration
This video provides a demonstration using a car to show how you can simulate open- and closed-loop systems in Simulink®.
First, you will learn how to model and tune open-loop systems. The...
See More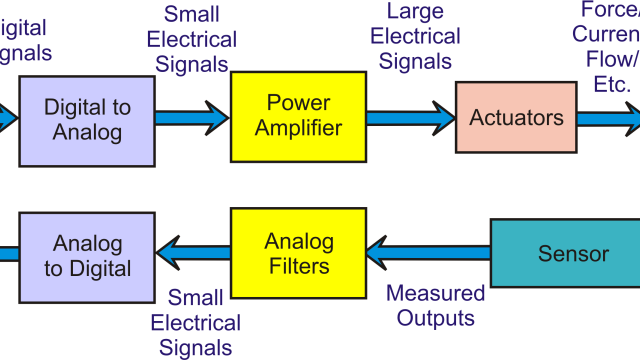
Thoughts on Furthering the Control Education of Practicing Engineers
60 min
Intermediate
Article / Blog
Demonstration
This paper was presented at the 2019 IFAC Advances on Control Education Conference (IFAC-ACE), Philadelphia, PA, USA, July 7-9, 2019, and is in the conference proceedings. This paper aims to...
See More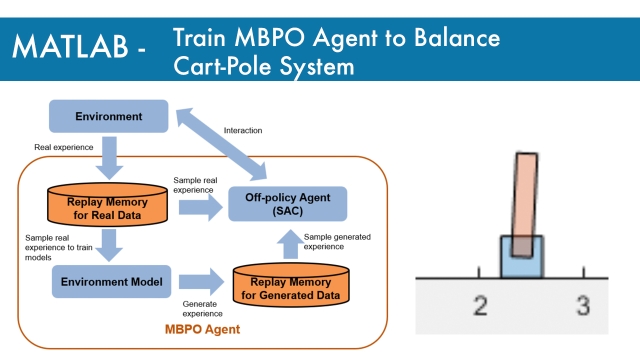
MATLAB Example: Train MBPO Agent to Balance Cart-Pole System
Intermediate
Example
Demonstration
This example shows how to train a model-based policy optimization (MBPO) agent to balance a cart-pole system modeled in MATLAB. For more information on MBPO agents, see Model-Based Policy...
See More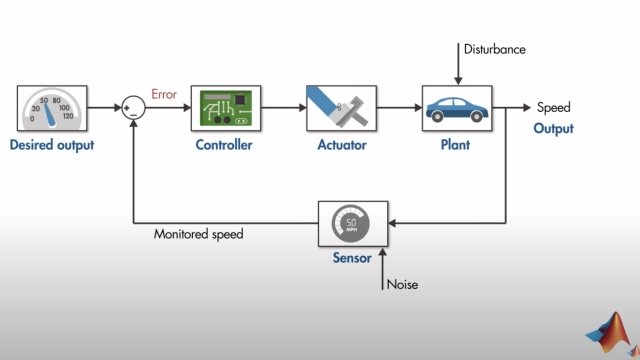
Understanding Control Systems: Components of a Feedback Control System
5 min
Beginner
Video
Demonstration
This video introduces the components of a feedback control system and how they interact with each other.
Learn basic terminology by walking through examples that include driving a car...
See More
What Is a Control System and Why Should I Care?
25 min
Beginner
Video
Demonstration
This is a 25 minute abbreviated version of the Part 1 & Part 2 talk. It goes through the basic ideas while skipping some of the details and examples of the longer talks. The talk abstract...
See More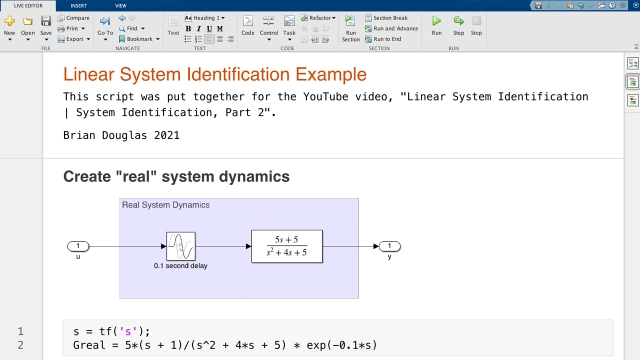
MATLAB Scripts for video "Linear System Identification | System Identificati...
Intermediate
Software
Demonstration
This Github repo contains the data files and MATLAB scripts that were used in the MATLAB Tech Talk video "Linear System Identification | System Identification, Part 2"
See More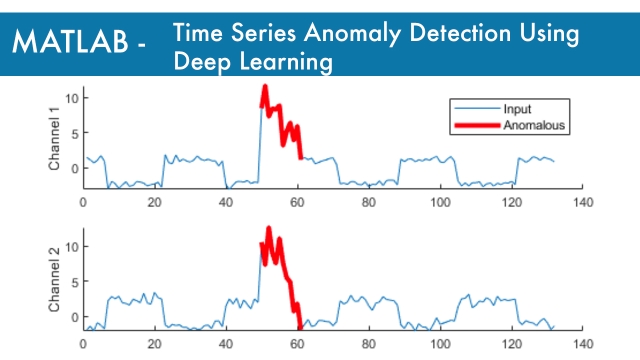
Time Series Anomaly Detection Using Deep Learning
Intermediate
Example
Demonstration
This example shows how to detect anomalies in sequence or time series data.
To detect anomalies or anomalous regions in a collection of sequences or time series data, you can use an...
See More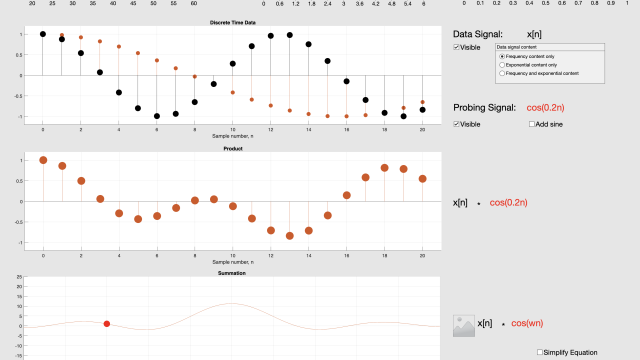
Discrete-Time Fourier Transform MATLAB App
Intermediate
App
Demonstration
This is the app that Brian Douglas created for his MATLAB Tech Talk video on the Z-transform.
See More
What Is a Control System and Why Should I Care? (Part 2)
34 min
Beginner
Video
Demonstration
This second video introduces some of the methods that engineers use to build control systems. It shows how we use science to help us derive models of systems from both measurements and...
See More
A Hybrid Lab Experience: Blending Hands-on Explorations with the Flexibility...
30 min
Beginner
Article / Blog
Demonstration
This case study examines how the Earth and Space Science and Engineering (ESSE) department at York University in Toronto offered a meaningful remote laboratory experience to over 180...
See More
What Is a Control System and Why Should I Care? (Part 1)
38 min
Beginner
Video
Demonstration
This video is the first of a two part series. It in introduces the basic concepts of feedback with lots of visual examples. The idea is to show that not only are these principles...
See More
Feedback in the Squishy Stuff: Introducing Chemical and Biological Process ...
29 min
Beginner
Video
Demonstration
Feedback doesn’t just happen in robots and self-driving cars, but in the regulation of our very bodies and in the ways in which we transform raw ingredients into materials we can use, be...
See More
Learning Dynamic Systems & Control Engineering with a Video Game
Intermediate
Video
Demonstration
Engineering Students at Northern Illinois University are learning one of their core subjects, Dynamic Systems & Control, with the aid of a video game.
See More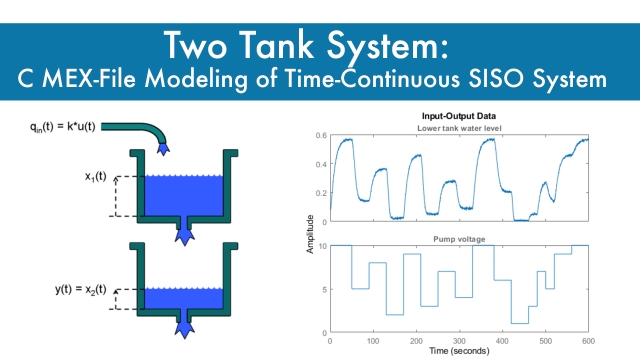
Two Tank System: C MEX-File Modeling of Time-Continuous SISO System
Intermediate
Software
Demonstration
This MATLAB example shows how to perform IDNLGREY modeling based on C MEX model files. It uses a simple system where nonlinear state space modeling really pays off.
See More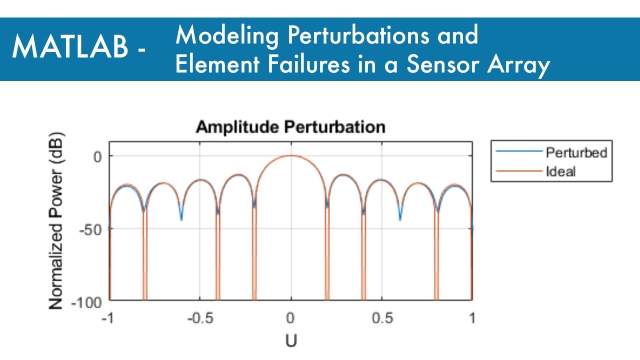
Modeling Perturbations and Element Failures in a Sensor Array
Beginner
Example
Demonstration
This MATLAB example shows how to model amplitude, phase, position and pattern perturbations as well as element failures in a sensor array.
See More
OIT System Design Laboratory (Japanese)
Beginner
Video
Demonstration
A collection of video lectures from OIT SDL.
See More
Data based modeling of nonlinear dynamic systems using System Identification...
Intermediate
Software
Demonstration
Using an engine throttle valve modeling example, this demo shares some perspectives on creation of nonlinear models of dynamic systems from the measurements of its input and outputs. It...
See More
Jupyter Notebook: Code used to generate vibrational control of inverted pend...
Intermediate
Software
Demonstration
Jupyter Notebook: Code used to generate vibrational control of inverted pendulum figures
See More
Simulink Onramp
120 min
Beginner
Tutorial
Demonstration
Learn the basics of how to create, edit, and simulate models in Simulink®. Use block diagrams to represent real-world systems and simulate components and algorithms.
See More