

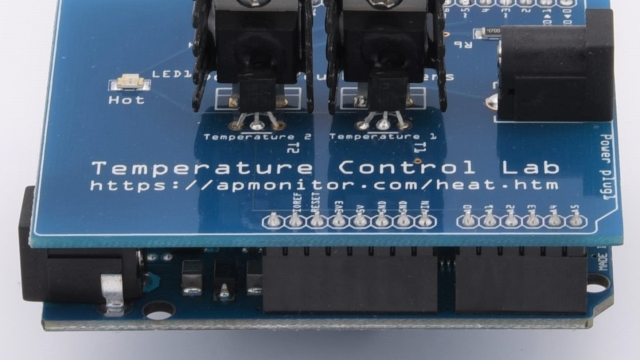
Temperature Control Lab (TCL)
Beginner
Hardware
Application
The temperature control lab is an application of feedback control with an Arduino, an LED, two heaters, and two temperature sensors. The heater power output is adjusted to maintain a desired...
See More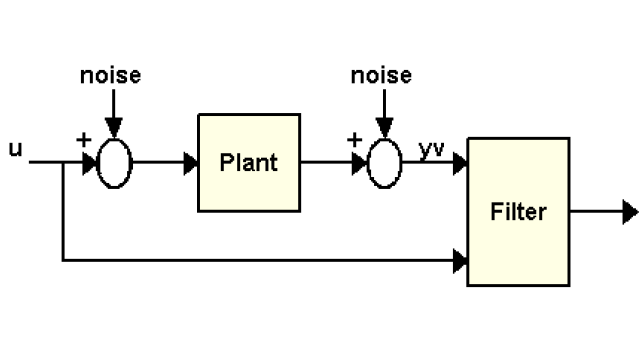
Kalman Filter Design
30 min
Intermediate
Article / Blog
Application
This example shows how to perform Kalman filtering. Both a steady state filter and a time varying filter are designed and simulated.
See More
Introducing Feedback Control to Middle and High School STEM Students, Part 2...
60 min
Intermediate
Article / Blog
Demonstration
This paper was presented at the 2019 IFAC Advances on Control Education Conference (IFAC-ACE), Philadelphia, PA, USA, July 7-9, 2019, and is in the conference proceedings. This paper aims at...
See More
Introducing Feedback Control to Middle and High School STEM Students, Part 1...
60 min
Intermediate
Article / Blog
Demonstration
This paper was presented at the 2019 IFAC Advances on Control Education Conference (IFAC-ACE), Philadelphia, PA, USA, July 7-9, 2019, and is in the conference proceedings. This paper aims at...
See More
Z-Transform - Practical Applications
26 min
Intermediate
Video
Application
Covering practical applications of the Z-transform used in digital signal processing, for example, stability analysis and frequency response of discrete-time systems. Theory, C code, and...
See More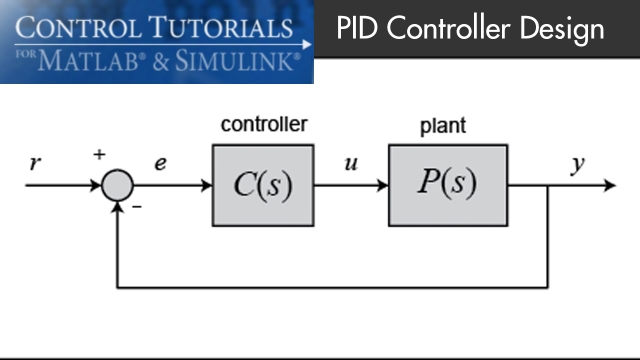
Introduction: PID Controller Design
30 min
Beginner
Article / Blog
Application
In this tutorial we will introduce a simple, yet versatile, feedback compensator structure: the Proportional-Integral-Derivative (PID) controller. The PID controller is widely employed...
See More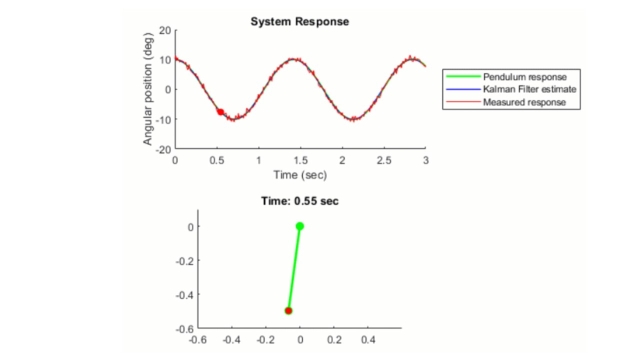
Kalman Filter Virtual Lab
Intermediate
Virtual Lab
Application
The Kalman Filter virtual laboratory contains interactive exercises that let you study linear and extended Kalman filter design for state estimation of a simple pendulum system. The virtual...
See More
Introduction to Noise Filtering
20 min
Intermediate
Article / Blog
Application
Introduction to filtering - moving average, first-order, anti-aliasing, set point softening
See More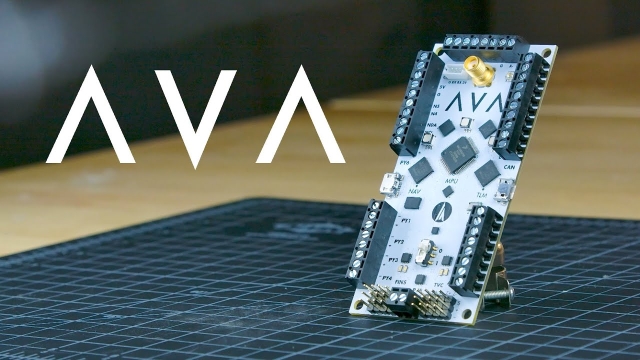
The AVA Flight Computer
18 min
Beginner
Video
Application
This video describes the board design, hardware architecture, and software components of the All Vehicle Avionics (AVA) flight computer that was designed by Joe Barnard of BPS Space. This...
See More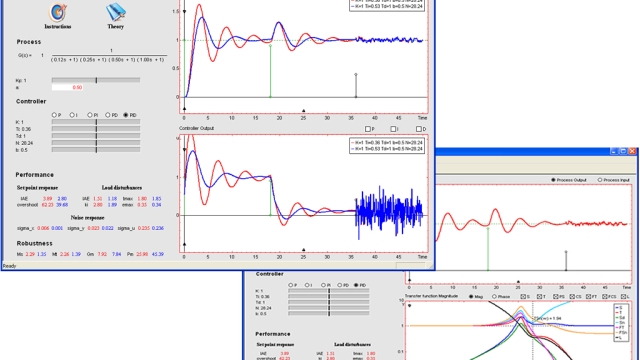
Interactive Tool for PID understanding
Intermediate
App
Application
The module PID Basics is designed to explore the properties of a simple feedback loop by showing the time and frequency responses of a closed-loop system and demonstrating how these...
See More
TinyEKF: Lightweight C/C++ Extended Kalman Filter with Python for prototypin...
Intermediate
Software
Application
TinyEKF is a simple C/C++ implementation of the Extended Kalman Filter that is general enough to use on different projects. In order to make it practical for running on Arduino, STM32, and...
See More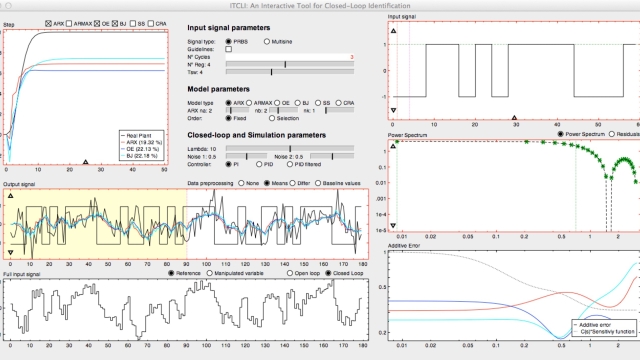
ITCLI: An Interactive Tool for Closed-Loop Identification
Intermediate
App
Application
The Interactive Tool for Closed-Loop Identification (ITCLI) is an interactive software tool for understanding SISO closed-loop identification using prediction-error techniques. The tool...
See More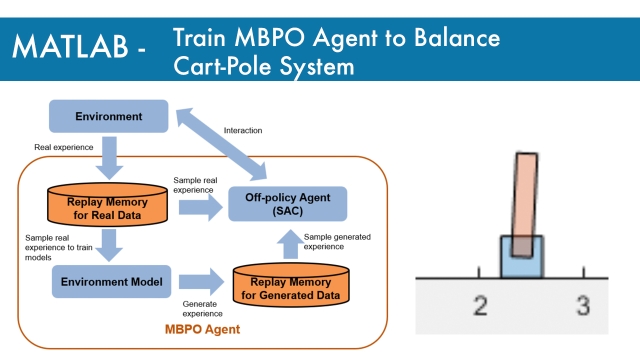
MATLAB Example: Train MBPO Agent to Balance Cart-Pole System
Intermediate
Example
Demonstration
This example shows how to train a model-based policy optimization (MBPO) agent to balance a cart-pole system modeled in MATLAB. For more information on MBPO agents, see Model-Based Policy...
See More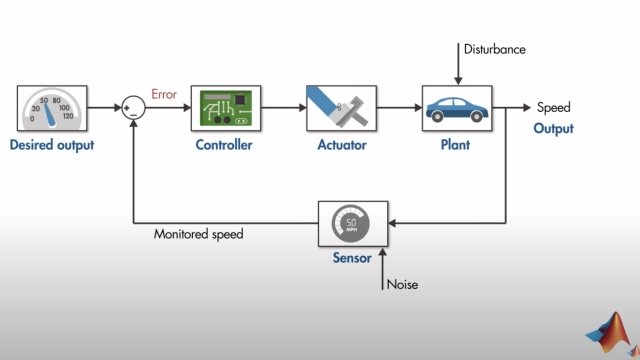
Understanding Control Systems: Components of a Feedback Control System
5 min
Beginner
Video
Demonstration
This video introduces the components of a feedback control system and how they interact with each other.
Learn basic terminology by walking through examples that include driving a car...
See More
Control Bootcamp: Kalman Filter Example in Matlab
22 min
Beginner
Video
Application
This lecture explores the Kalman Filter in Matlab on an inverted pendulum on a cart.
See More
TCLab PID Control
60 min
Intermediate
Article / Blog
Application
Implement a PID controller on the Temperature Control Lab hardware to drive the temperature from room temperature to 60 degrees C. This resource lets you attempt the design yourself first...
See More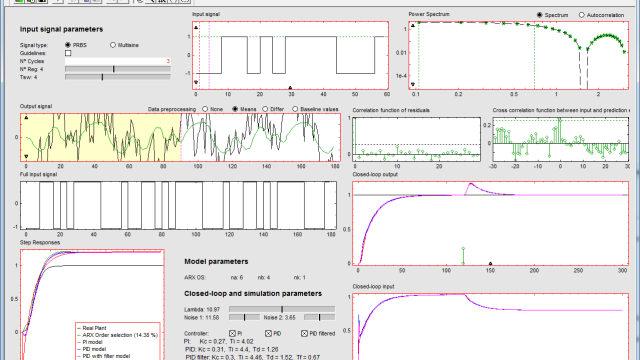
i-pIDtune: An interactive tool for integrated system identification and PID ...
Intermediate
App
Application
i-pIDtune is an interactive software tool that integrates system identification and PID controller design. The tool supports experimental design and execution under plant-friendly conditions...
See More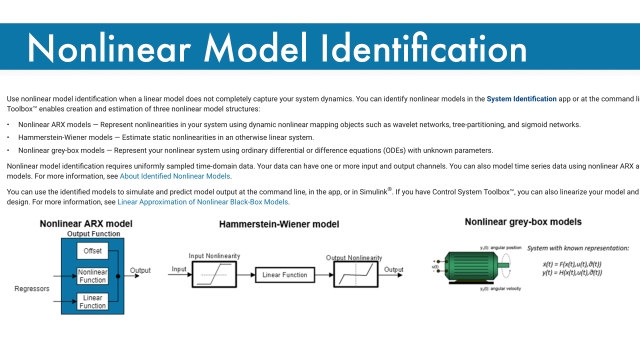
Nonlinear Model Identification
Intermediate
Article / Blog
Application
Mathwork overview page describing nonlinear model identification. Use nonlinear model identification when a linear model does not completely capture your system dynamics. You can identify...
See More
Vibrational Control in Insect Flight
7 min
Intermediate
Video
Application
Abstract: It is generally accepted among biology and engineering communities that insects are unstable at hover. However, existing approaches that rely on direct averaging do not fully...
See More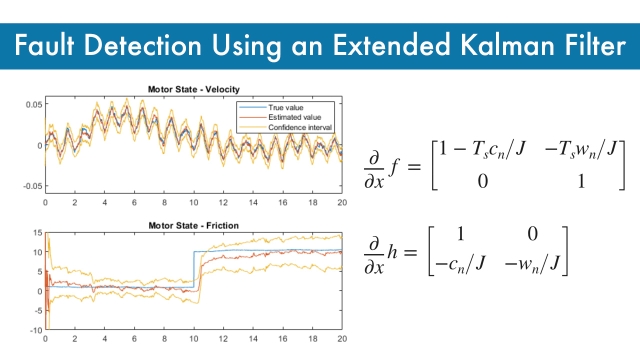
MATLAB Example: Fault Detection Using an Extended Kalman Filter
Intermediate
Project
Application
This example shows how to use an extended Kalman filter for fault detection. The example uses an extended Kalman filter for online estimation of the friction of a simple DC motor...
See More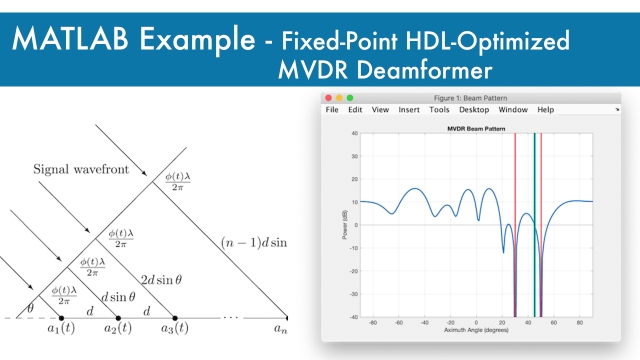
Fixed-Point HDL-Optimized Minimum-Variance Distortionless-Response (MVDR) Be...
Intermediate
Example
Application
This example shows how to implement a fixed-point HDL-optimized minimum-variance distortionless-response (MVDR) beamformer in MATLAB.
See More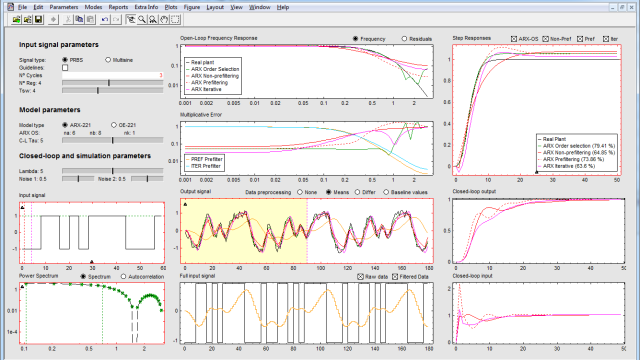
ITCRI: An Interactive Software Tool for Control-Relevant Identification
Intermediate
App
Application
The Interactive Tool for Control Relevant Identification (ITCRI) comprehensively captures the control-relevant identification process, from input design to closed-loop control, depicting...
See More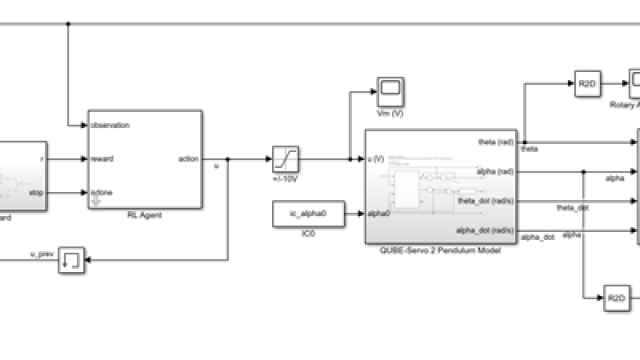
Using the Reinforcement Learning Toolbox™ to Balance an Inverted Pendulum
30 min
Intermediate
Article / Blog
Application
Reinforcement learning (RL) is a subset of Machine Learning that uses dynamic data, not static data like unsupervised learning or supervised learning. Reinforcement learning is used in many...
See More
Twitter Thread: Vibrational control of mechanical systems
Intermediate
Social Media
Application
This Twitter thread by @ahmedallibhoy walks through an explanation of controlling an inverted pendulum with an open-loop vibrational controller.
See More
A real control system - how to start designing
26 min
Beginner
Video
Application
Let’s design a control system the way you might approach it in a real situation rather than an academic one. In this video, I step through a control problem and show how control theory is...
See More