

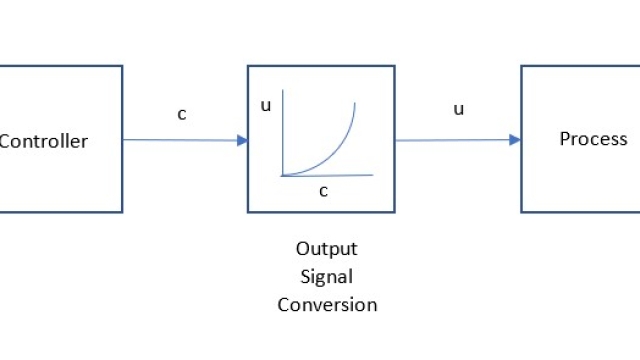
Nonlinear Control Output Signal Characterization
15 min
Intermediate
Article / Blog
Application
If the process gain makes large changes over the operating range, then tuning PID (or other linear) controllers is difficult. If tuned for one region, the controller is undesirably sluggish...
See More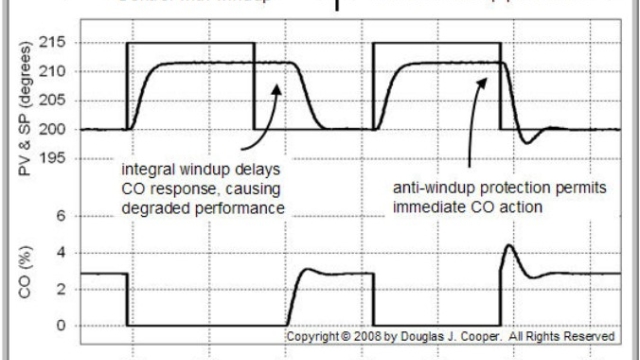
Integral Wind-Up and Solution
Intermediate
Article / Blog
Application
What is integral wind-up and how velocity mode solves it.
See More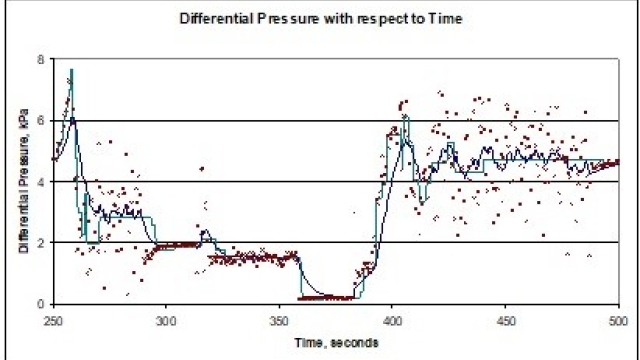
A Statistical Noise Filter
20 min
Intermediate
Article / Blog
Application
A noise filter that uses Statistical Process Control (SPC) techniques to temper tampering
See More
PID Controller Implementation in Software
20 min
Intermediate
Video
Application
How to implement a PID controller in software using C, discussing theory and practical considerations. Demonstration of PID controller code using a custom flight simulator.
See More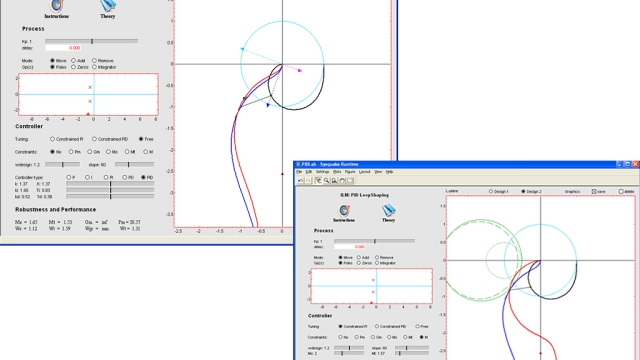
Interactive Tool for Loop Shaping understanding based on PID control
Intermediate
App
Application
Loop shaping is a design method where it is attempted to choose a controller such that the loop transfer function obtains the desired shape. In this module the loop transfer function is...
See More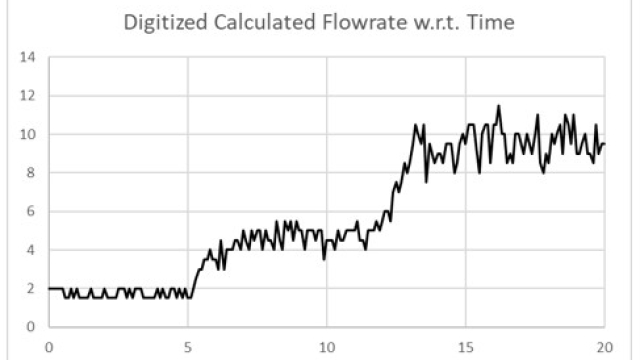
Measurements, Transmission Signals, and Issues
45 min
Intermediate
Article / Blog
Application
This is an introduction to scaled information transmission signals (for example 4-20 mA, 3-15 psig, etc.), the actual sensed signals (like using orifice dP to infer flow rate, or temperature...
See More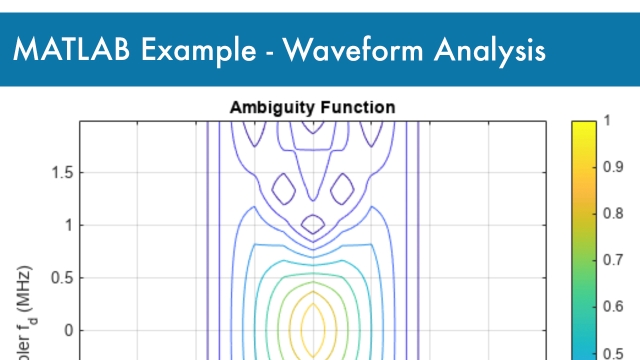
MATLAB Example: Waveform Analysis Using the Ambiguity Function
Intermediate
Example
Application
This example shows how to use the ambiguity function to analyze waveforms. It compares range and Doppler capabilities of several common pulsed waveforms such as the rectangular waveform, the...
See More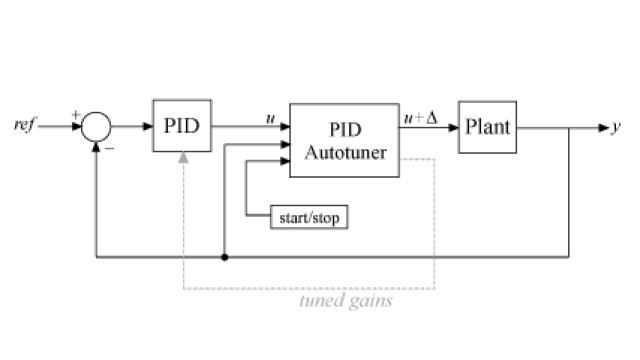
Online Tuning using Simulink’s Closed-Loop PID Autotuner Block
30 min
Intermediate
Article / Blog
Application
Learn how to conduct an online tuning of a PI-speed controller using the MATLAB/Simulink Closed-Loop PID Autotuner Block. Tuned controller is validated on a Quanser QLabs Virtual QUBE-Servo...
See More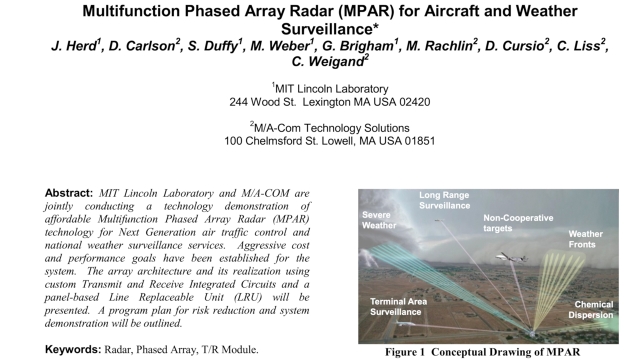
Multifunction Phased Array Radar (MPAR) for Aircraft and Weather Surveillanc...
Intermediate
Peer Reviewed Paper
Application
MIT Lincoln Laboratory and M/A-COM are jointly conducting a technology demonstration of affordable Multifunction Phased Array Radar (MPAR) technology for Next Generation air traffic control...
See More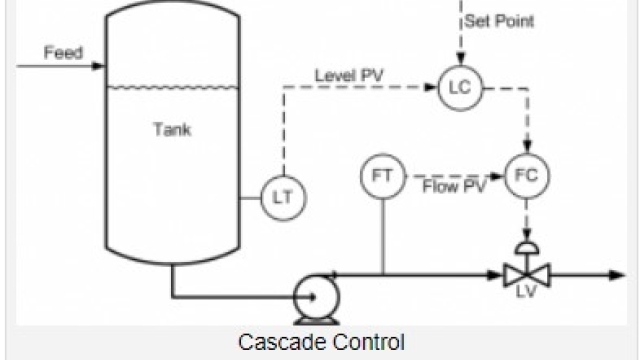
Cascade Control
30 min
Intermediate
Article / Blog
Application
What is Cascade Control and why use it?
See More
First Order Plus Dead Time Tuning App for PI Controllers
Intermediate
App
Application
The FOPTD_PI Tool is a Matlab-Interactive tuning tool of PI controllers for First Order PlusTime Delay processes. It can be used to teach basic control concepts based on a set of PI tuning...
See More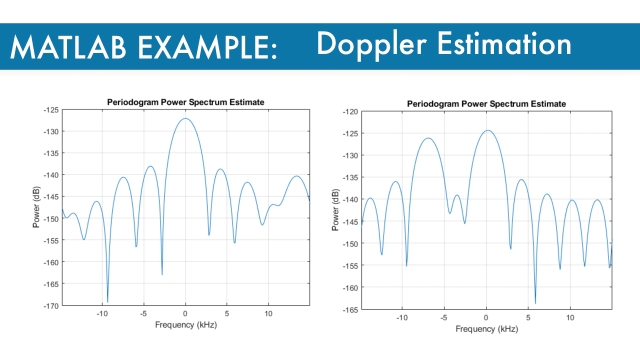
MATLAB Example: Doppler Estimation
Intermediate
Example
Application
This example shows a monostatic pulse radar detecting the radial velocity of moving targets at specific ranges. The speed is derived from the Doppler shift caused by the moving targets. We...
See More
Orifice Calibration
15 min
Intermediate
Article / Blog
Application
The ISO method for orifice design and calibration is grounded in the ideal square-root relation between pressure drop and flow rate, specifies the in-pipe structure for an orifice, and...
See More
Bumpless Transfer and Tuning
15 min
Intermediate
Article / Blog
Application
Switching from MAN to AUTO mode or LOCAL to CASCADE or changing the controller integral time should not cause a change in the controller output, a bump. But a primitive coding of the PID...
See More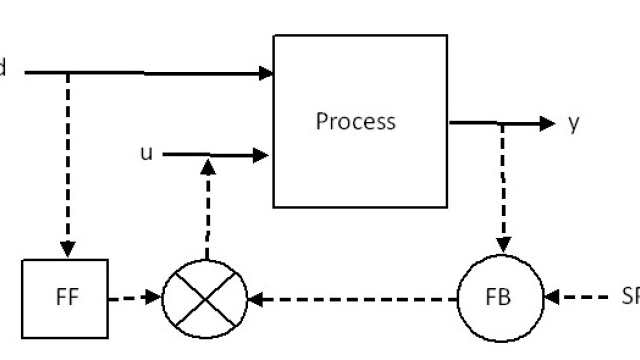
Feedforward Control
15 min
Intermediate
Article / Blog
Application
When and how to use Feedforward Control
See More
Real-Time Software Implementation of Analog Filters
14 min
Intermediate
Video
Application
Modelling analog filters, discretisation, and implementation of the digitally-equivalent filters on a real-time, embedded system (STM32). Includes theory, DSP, firmware, and results.
See More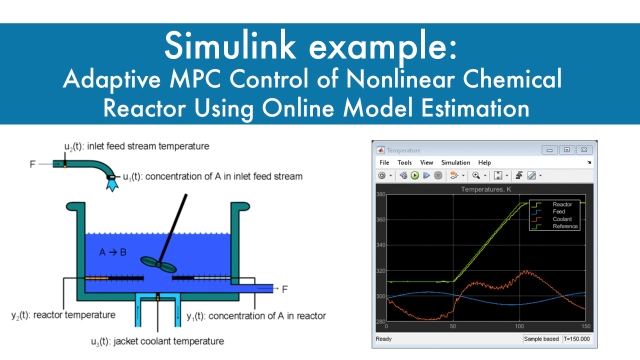
Simulink example: Adaptive MPC Control of Nonlinear Chemical Reactor Using O...
Intermediate
Project
Application
This example shows how to use an Adaptive MPC controller to control a nonlinear continuous stirred tank reactor (CSTR) as it transitions from low conversion rate to high conversion rate.
A...
See More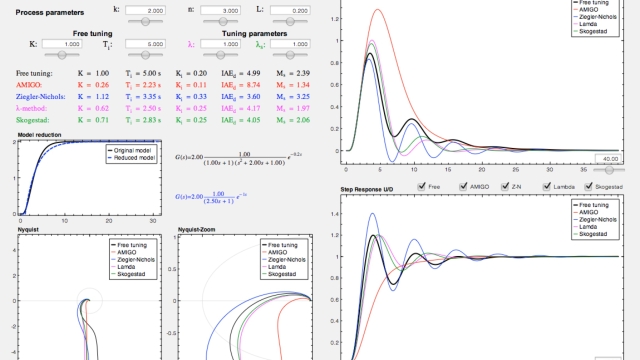
Interactive Tool about PID tuning rules
Intermediate
App
Application
Hundreds of PID design methods are available in literature. Many of them are very similar and sometimes it is not straightforward to understand their purposes. This interactive software tool...
See More
Interpreting Lines on PFDs and P&IDs
20 min
Intermediate
Article / Blog
Application
Lines on a process flow diagram (PFD) indicate material flow. In contrast, on a piping and instrument diagram (P&ID), the control overlay for the PFD, the lines represent information flow. ...
See More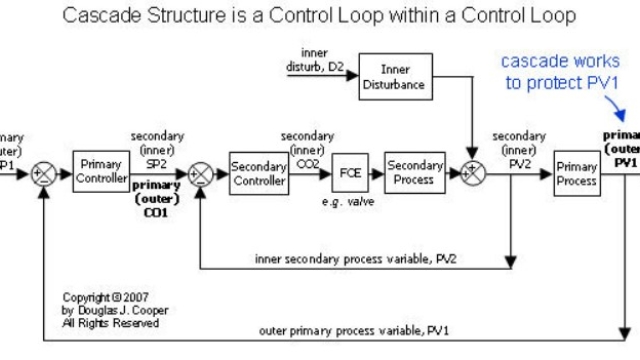
Cascade Control 2
Intermediate
Article / Blog
Application
An Implementation Recipe for Cascade Control
See More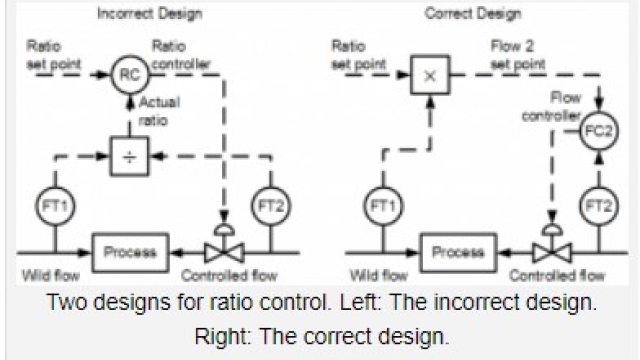
Ratio Control - the right and wrong approach
15 min
Intermediate
Article / Blog
Application
A discussion as to why the ratio should be the MV (controller output) not the CV.
See More
MATLAB Example: Train Multiple Agents for Area Coverage
Intermediate
Example
Application
This example demonstrates a multi-agent collaborative-competitive task in which you train three proximal policy optimization (PPO) agents to explore all areas within a grid-world environment...
See More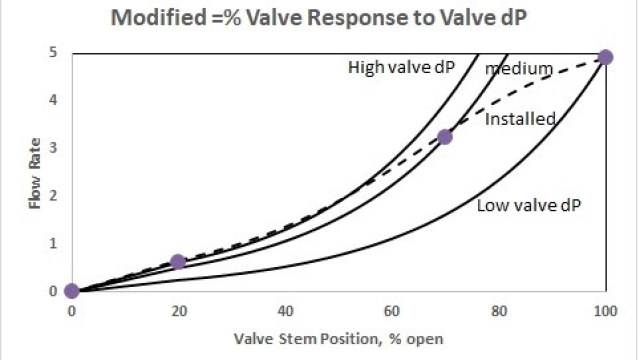
Understanding Valve Flow Characteristics
20 min
Intermediate
Article / Blog
Application
The response of flow rate through a control valve depends on the friction losses in the piping in which it is installed as well as the controller signal. The installed characteristic (a...
See More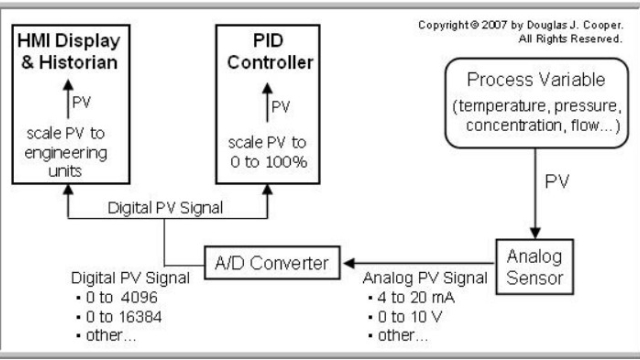
Scaled Transmission Signals, Engineering Units, and Conversions
30 min
Intermediate
Article / Blog
Application
Information is transmitted in scaled signals (4-20 mA, 3-15 psig, 0-100%, digital counts), which are also deviations from some reference vales (such as psi gage is to psia). But process...
See More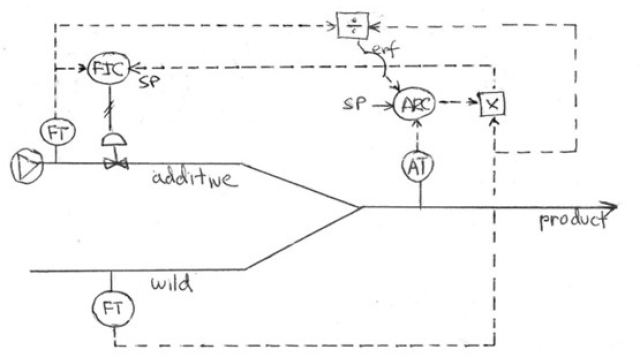
Ratio Control and Scaled Signal Calculations
15 min
Intermediate
Article / Blog
Application
When and how to use Ratio Control and use Scaled Signals
See More