

Data Preprocessing and the Short-Time Fourier Transform | Deep Learning for ...
16 min
Beginner
Video
Theory
Data in its raw form might not be ideal for training a network. There are some changes we can make to the data that are often desired or sometimes necessary in order to make training faster...
See More")
Principal Component Analysis (PCA)
13 min
Beginner
Video
Theory
Principal component analysis (PCA) is a workhorse algorithm in statistics, where dominant correlation patterns are extracted from high-dimensional data.
See More
Root Locus Plot: Common Questions and Answers
17 min
Beginner
Video
Theory
In this video I go through some of the common questions I've received on my other root locus videos. 1) Why do we call the poles of a system the roots?2) How do I plot the damping ratio...
See More
Peter Ponders PID - InputShaping
21 min
Beginner
Video
Theory

Linearizing a Simulink Model Using the Linear Analysis Tool and ‘linmod’
55 min
Beginner
Video
Application
In this video we show how to linearize a non-linear Simulink model using numerical techniques. This approach is extremely powerful as it allows automatic ge...
See More
Digital Twins
8 min
Beginner
Video
Theory
This lecture discusses the use of data-driven digital twins in advanced model-based design and engineering, and the related digital thread, which ties together the data throughout an entire...
See More
Gain and Phase Margins Explained!
13 min
Beginner
Video
Theory
In this video I explain gain and phase margins. If you are confused by this topic I hope this video will help tie all of the concepts together that go into understanding what gain and phase...
See More
Peter Ponders PID - Root Locus Is Useless
25 min
Beginner
Video
Theory

Time Domain Analysis with Matlab: Using the Linear System Analyzer
37 min
Beginner
Video
Theory
In this video we explore various Matlab functions and workflows to perform time domain analysis of a dynamic system. This includes the use of ‘tf’, ‘step’, ...
See More
Control Bootcamp: Benefits of Feedback on Cruise Control Example
14 min
Beginner
Video
Theory
Here we investigate the benefits of feedback for systems with uncertain dynamics and disturbances, as illustrated on a cruise control example.
See More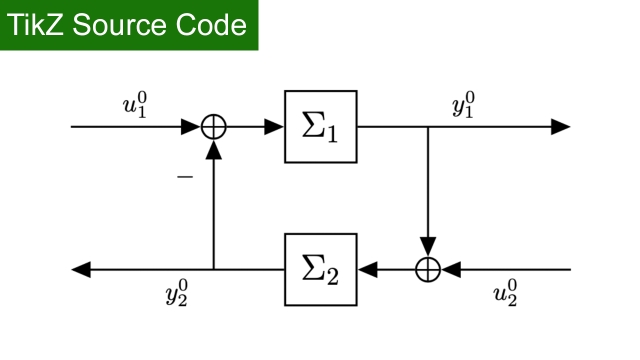
TikZ source Code: Two systems in negative feedback
Beginner
Source Code
Application
TikZ source Code: Two systems in negative feedback
See More
Fourier Series: Part 2
6 min
Beginner
Video
Theory
This video will show how to approximate a function with a Fourier series, which is an infinite sum of sines and cosines. We will discuss how these sines and cosines form a basis for the...
See More
Designing a Lag Compensator with Root Locus
11 min
Beginner
Video
Theory
This video walks through a phase lag compensator example using the Root Locus method.
See More
Derivation and Solution of Laplace’s Equation
33 min
Beginner
Video
Theory
In this video we show how the heat equation can be simplified to obtain Laplace’s equation. We investigate how to solve Laplace’s equation using separation ...
See More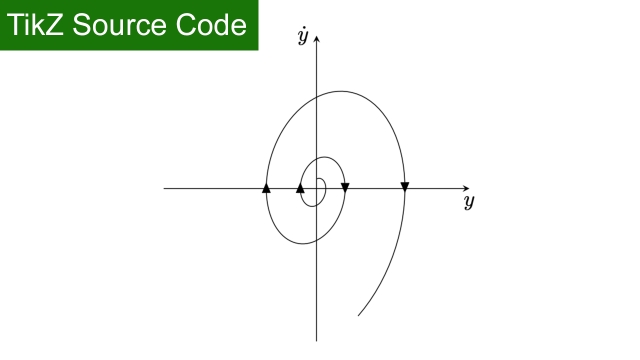
TikZ source Code: Sliding Mode Control Example System 2
Beginner
Source Code
Application
TikZ source Code: Sliding Mode Control Example System 2
See More
Lecture 11: Transient Response and Numerical Problems
30 min
Beginner
Video
Theory
![SVD: Importance of Alignment [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_422.jpg?itok=Ix4uqD1g)
SVD: Importance of Alignment [Python]
6 min
Beginner
Video
Application
This video describes the importance of aligning data when using the singular value decomposition (SVD) (Python code).
See More
Particle Filter Explained without Equations
7 min
Beginner
Video
Theory
This video provides a quick graphical introduction to the particle filter. It does a good job building some intuition behind the filter without ever touching on any mathematics. It's worth a...
See More")
Frequency domain – tutorial 1: concept of frequency (with Chinese subtitle)
9 min
Beginner
Video
Theory
In this video, the following materials are covered:1) intuitive explanation on the frequency concept 2) what is the relation between time and frequency domai...
See More
Lecture 22: Frequency domain specifications for Second order system
39 min
Beginner
Video
Theory

Transfer Functions in Simulink for Process Control
11 min
Beginner
Video
Theory
An introduction on deriving transfer functions from a linearized state space model via Laplace Transforms, and how we can input transfer functions into Simul...
See More
Time domain - tutorial 8: LTI systems, impulse response & convolution
13 min
Beginner
Video
Theory
In this video, the following materials are covered:1) the beauty of linear & time invariant (LTI) systems2) why the impulse response of an LTI system is so i...
See More
Posicast Control 2 - ( In English )
5 min
Beginner
Video
Theory
This video is about the Half-Cycle Posicast. It includes some hints about how to simulate this type of control using Simulink
See More
Understanding Model Predictive Control, Part 7: Adaptive MPC Design with Sim...
8 min
Beginner
Video
Theory
In this video, you will learn how to design an adaptive MPC controller for an autonomous steering vehicle system whose dynamics change with respect to the longitudinal velocity. After you...
See More
Direct Design Example for PID Controller
7 min
Beginner
Video
Theory
I go through an example problem of how we can use Direct Design (also called Direct Synthesis) to determine the tuning parameters for a PID controller, given...
See More