


What are Lead Lag Compensators? An Introduction.
11 min
Beginner
Video
Theory
This videos covers the very basic definition of what a lead/lag compensator is. Every control system engineer should have a basic understanding of lead/lag compensators since along with PID...
See More
Systems Engineering, Part 3: The Benefits of Functional Architectures
14 min
Beginner
Video
Theory
Functional, logical, and physical architectures are important tools for designing complex systems. We describe what architectures are and how they contribute to the early stages of a project...
See More
ENG 1718 - MODELAGEM DE SISTEMAS DINÂMICOS (Portuguese)
500 min
Beginner
Video
Theory
Vídeos do curso Modelagem de Sistemas Dinâmicos. Mais informações na página do curso: https://helonayala.github.io/teaching/2018-msd/
See More
Machine Learning: What is easy, medium, and hard?
38 min
Beginner
Video
Theory
This video gives a brief overview of what is easy, medium, and hard in machine learning, explored through case studies. Progress in machine learning is rapidly advancing, and changing the...
See More
Regulatory PID (Polish)
18 min
Beginner
Video
Theory
W tym odcinku, opisze wam podstawy działania regulatorów PID.
See More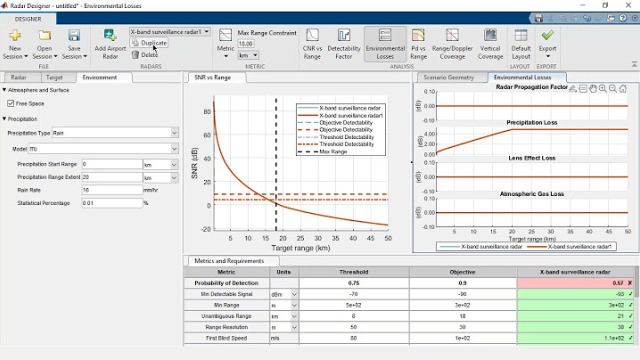
Radar Design with the Radar Designer App
5 min
Beginner
Video
Theory
The Radar Designer app is an interactive tool that assists engineers and system analysts with high-level design and assessment of radar systems at the early stage of radar development.
See More
Robust Control, Part 3: Disk Margins for MIMO Systems
16 min
Beginner
Video
Theory
This video shows how margin can be used to assess the robustness of multi-input, multi-output systems. We’ll show how disk margin is a more complete way to represent margin for MIMO systems...
See More
Singular Value Decomposition (SVD): Overview
6 min
Beginner
Video
Theory
This video presents an overview of the singular value decomposition (SVD), which is one of the most widely used algorithms for data processing, reduced-order modeling, and high-dimensional...
See More
So You Want to be a Systems Engineer
53 min
Beginner
Video
Theory
A presentation by Gentry Lee on what qualities and characteristics make a great systems engineer. At the time of the presentation, Gentry Lee was the Chief Engineer for the Solar System...
See More
How are Beamforming and Precoding Related?
12 min
Beginner
Video
Theory
Explains the relationship between Beamforming and Precoding in multi-antenna communication systems. Also discusses the relationship to Diversity.
See More
Interactive Course for Control Theory
Beginner
Course
Theory
Control Theory is a topic that finds a widespread application throughout engineering and natural sciences. It is very common in electrical, mechanical and process engineering. Especially...
See More
Základy automatizácie a teórie systémov – videokurz (Slovak)
Beginner
Article / Blog
Theory
Pozrite si videokurz zo základov teórie systémov a automatizácie. Náš kurz má 7 lekcií.
See More")
Robotic Car - How to read Gyro Datasheets (Part 1)
14 min
Beginner
Video
Theory
Have you ever been lost trying to understand the information in a gyro datasheet? This video should help! In this first part I go through the mechanical characteristics of a MEMS gyro and...
See More
Peter Ponders PID - Introduction
3 min
Beginner
Video
Theory
The purpose of this video is to inform the viewer about what to expect. My videos go much deeper than the typical videos. They are geared for graduate st...
See More
Robust Control, Part 4: Working with Parameter Uncertainty
13 min
Beginner
Video
Theory
The previous two videos showed a few different ways to quantify how robust a system is to model and plant uncertainty by looking at how much input and output variation it can handle before...
See More
READ FIRST: How to learn PLC's and get into the Industrial Automation World ...
Beginner
Article / Blog
Theory
r/PLC is dedicated to discussion and questions about Programmable Logic Controllers (PLCs): "an industrial digital computer that has been ruggedized and adapted for the control of...
See More
Model Reference Adaptive Control Fundamentals (Dr. Tansel Yucelen)
91 min
Beginner
Video
Theory
Forum on Robotics & Control Engineering (FoRCE, http://force.eng.usf.edu/) Seminar Series: "Model Reference Adaptive Control Fundamentals" (Dr. Tansel Yucelen)
See More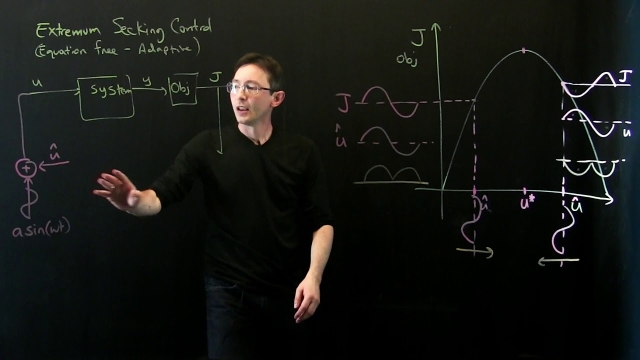
Extremum Seeking Control
18 min
Beginner
Video
Theory
This lecture provides an overview of extremum-seeking control (ESC), which is an adaptive equation free method of controlling nonlinear systems. A sinusoidal perturbation is added to the...
See More
Online and Recursive System Identification | System Identification, Part 4
19 min
Beginner
Video
Theory
Online system identification algorithms estimate the parameters and states of a model as new data is measured and available in real-time or near real-time. Brian Douglas covers what online...
See More
Gain a better understanding of Root Locus Plots using Matlab
19 min
Beginner
Video
Theory
In this video I go through various ways to use Matlab to plot and visualize the root locus.
See More
Reinforcement Learning: An Introduction
Beginner
Book
Theory
From the book introduction:
The idea that we learn by interacting with our environment is probably the first to occur to us when we think about the nature of learning. When an infant plays...
See More
Systems Engineering, Part 2: Towards a Model-Based Approach
13 min
Beginner
Video
Theory
The role of systems engineering is to help find and maintain a balance between the stakeholder needs, the management needs, and the engineering needs of a project. So we can think of it as...
See More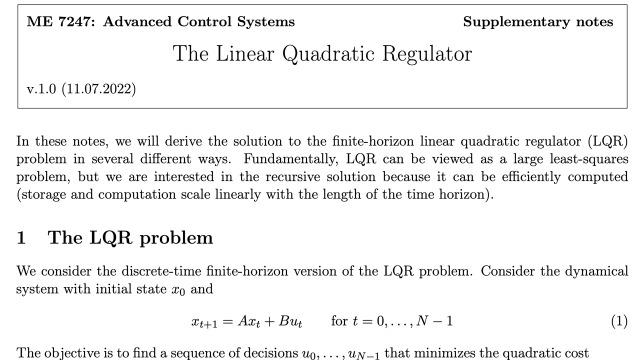
The Linear Quadratic Regulator
Beginner
Article / Blog
Theory
In these notes, we will derive the solution to the finite-horizon linear quadratic regulator (LQR) problem in several different ways. Fundamentally, LQR can be viewed as a large least...
See More
Student's Guide to Bayesian Statistics
15 min
Beginner
Video
Theory
This video provides a summary of a textbook Bed Lambert wrote on Bayesian inference and accompanying (freely available) YouTube course.
See More
CS224n: Natural Language Processing with Deep Learning | Winter 2021
Beginner
Course
Theory
This course covers the foundations of the effective modern methods for deep learning applied to NLP, a big picture understanding of human languages and the difficulties in understanding and...
See More