

ENG 1718 - MODELAGEM DE SISTEMAS DINÂMICOS (Portuguese)
500 min
Beginner
Video
Theory
Vídeos do curso Modelagem de Sistemas Dinâmicos. Mais informações na página do curso: https://helonayala.github.io/teaching/2018-msd/
See More
Regulatory PID (Polish)
18 min
Beginner
Video
Theory
W tym odcinku, opisze wam podstawy działania regulatorów PID.
See More
Why Padé Approximations Are Great! | Control Systems in Practice
Beginner
Video
Theory
Watch an introduction to Padé approximations. Learn what Padé approximations are and how to calculate them, why they are important, and when to use them—specifically in the context of time...
See More
Intro to Data Science: Overview
6 min
Beginner
Video
Theory
This lecture provides an introductory overview to data science. I will discuss the high-level goals of this lecture series, and how data science is about asking and answering questions with...
See More
Robust Control, Part 3: Disk Margins for MIMO Systems
16 min
Beginner
Video
Theory
This video shows how margin can be used to assess the robustness of multi-input, multi-output systems. We’ll show how disk margin is a more complete way to represent margin for MIMO systems...
See More
So You Want to be a Systems Engineer
53 min
Beginner
Video
Theory
A presentation by Gentry Lee on what qualities and characteristics make a great systems engineer. At the time of the presentation, Gentry Lee was the Chief Engineer for the Solar System...
See More
Interactive Course for Control Theory
Beginner
Course
Theory
Control Theory is a topic that finds a widespread application throughout engineering and natural sciences. It is very common in electrical, mechanical and process engineering. Especially...
See More
Základy automatizácie a teórie systémov – videokurz (Slovak)
Beginner
Article / Blog
Theory
Pozrite si videokurz zo základov teórie systémov a automatizácie. Náš kurz má 7 lekcií.
See More
Introduction to Anomaly Detection for Engineers
15 min
Beginner
Video
Theory
Anomaly detection is the process of identifying events or patterns that differ from expected behavior. This is important for applications like predictive maintenance but can be hard to...
See More
Control Bootcamp: LQG Example in Matlab
13 min
Beginner
Video
Theory
This video combines the LQR and Kalman filter in Matlab on the example of an inverted pendulum on a cart. We stabilize the full nonlinear system with a measurement of a single variable (the...
See More")
Robotic Car - How to read Gyro Datasheets (Part 1)
14 min
Beginner
Video
Theory
Have you ever been lost trying to understand the information in a gyro datasheet? This video should help! In this first part I go through the mechanical characteristics of a MEMS gyro and...
See More
Control Systems in Practice, Part 1: What Control Systems Engineers Do
14 min
Beginner
Video
Theory
This video walks through the phases of a typical project and describes what it means to be a control systems engineer. It covers the concept formulation phase, in which your job is to help...
See More
Robust Control, Part 4: Working with Parameter Uncertainty
13 min
Beginner
Video
Theory
The previous two videos showed a few different ways to quantify how robust a system is to model and plant uncertainty by looking at how much input and output variation it can handle before...
See More
Nonlinear System Identification | System Identification, Part 3
17 min
Beginner
Video
Theory
Learn about nonlinear system identification by walking through one of the many possible model options: A nonlinear ARX model. Brian Douglas covers the importance of adding an offset term to...
See More
READ FIRST: How to learn PLC's and get into the Industrial Automation World ...
Beginner
Article / Blog
Theory
r/PLC is dedicated to discussion and questions about Programmable Logic Controllers (PLCs): "an industrial digital computer that has been ruggedized and adapted for the control of...
See More
Model Reference Adaptive Control Fundamentals (Dr. Tansel Yucelen)
91 min
Beginner
Video
Theory
Forum on Robotics & Control Engineering (FoRCE, http://force.eng.usf.edu/) Seminar Series: "Model Reference Adaptive Control Fundamentals" (Dr. Tansel Yucelen)
See More![Pole Placement for the Inverted Pendulum on a Cart [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_490.jpg?itok=qWteM4RS "Pole Placement for the Inverted Pendulum on a Cart [Control Bootcamp]")
Pole Placement for the Inverted Pendulum on a Cart [Control Bootcamp]
12 min
Beginner
Video
Theory
Here we use the 'place' command in Matlab to design full-state feedback gains to specify the eigenvalues of the closed-loop system. This is demonstrated on the inverted pendulum on a cart.
See More
A simple MEMS gyro model using MATLAB / Simulink
16 min
Beginner
Video
Theory
This video walks through how to model a simple MEMS gyroscope using MATLAB/Simulink. At the end I show you how to linearize this model to use in your linear control loop design and analysis.
See More
Gain a better understanding of Root Locus Plots using Matlab
19 min
Beginner
Video
Theory
In this video I go through various ways to use Matlab to plot and visualize the root locus.
See More
My Sole Advise to Data Scientists on Coursera & Quora
Beginner
Article / Blog
Theory
This blog post by Tarry Singh answers questions including "How do I get started in the field on Machine Learning, Deep Learning or Artificial Intelligence" and "How do I advance from the...
See More
Systems Engineering, Part 2: Towards a Model-Based Approach
13 min
Beginner
Video
Theory
The role of systems engineering is to help find and maintain a balance between the stakeholder needs, the management needs, and the engineering needs of a project. So we can think of it as...
See More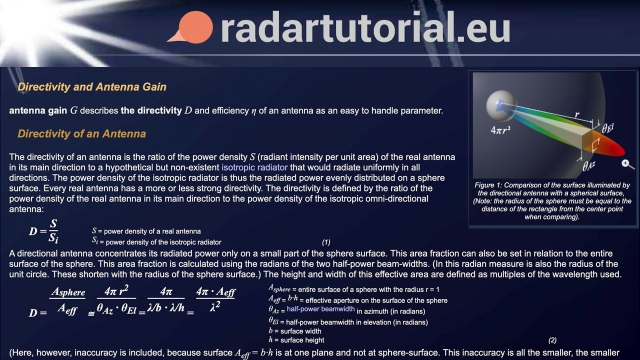
Directivity and Antenna Gain - radartutorial.eu
Beginner
Article / Blog
Theory
This page describes antenna directivity and gain. The directivity of an antenna is the ratio of the power density S (radiant intensity per unit area) of the real antenna in its main...
See More
Student's Guide to Bayesian Statistics
15 min
Beginner
Video
Theory
This video provides a summary of a textbook Bed Lambert wrote on Bayesian inference and accompanying (freely available) YouTube course.
See More
PID Explained
20 min
Beginner
Article / Blog
Theory
A qualitative explanation of P, I, & D actions using graphs.
See More
Intro to Data Science: Historical Context
8 min
Beginner
Video
Theory
This lecture provides some historical context for data science and data-intensive scientific inquiry.
See More