


RL Course by David Silver - Lecture 7: Policy Gradient Methods
94 min
Intermediate
Video
Theory
Looks at different policy gradients, including Finite Difference, Monte-Carlo and Actor Critic.
See More
Root Locus Plot: Common Questions and Answers
17 min
Beginner
Video
Theory
In this video I go through some of the common questions I've received on my other root locus videos. 1) Why do we call the poles of a system the roots?2) How do I plot the damping ratio...
See More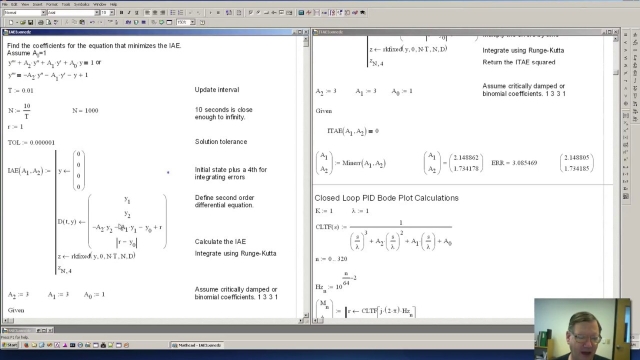
Peter Ponders PID - IAE,ITAE,ISE Performance indicators
17 min
Beginner
Video
Theory
Performance indicators can be used to compute closed loop pole locations. Only one gain parameter is required to move the pole locations closer to the origi...
See More
Into Stability: Walter R Evans and the Story of Root Locus
Beginner
Book
Theory
In the aftermath of World War II, engineers faced challenges their slide rules couldn’t solve. Walter R. Evans wasn’t looking to change the world—he just wanted to help engineers see clearly...
See More
Numerically Calculating Partial Derivatives
59 min
Beginner
Video
Theory
In this video we discuss how to calculate partial derivatives of a function using numerical techniques. In other words, these partials are calculated withou...
See More
Constraint Enforcement for Improved Safety | Learning-Based Control
14 min
Beginner
Video
Theory
Learn about the constraints of your system. Then see a how to enforce those constraints so the system does not violate them. Constraint enforcement is important for safety-critical...
See More
Gain and Phase Margins Explained!
13 min
Beginner
Video
Theory
In this video I explain gain and phase margins. If you are confused by this topic I hope this video will help tie all of the concepts together that go into understanding what gain and phase...
See More
Auto Tuning a Small DC Motor in Torque Mode
1 min
Beginner
Video
Theory
I was really testing the picture in picture feature of the Screen Flow software I use to make these videos. I knew the auto tuning would work. I kept the v...
See More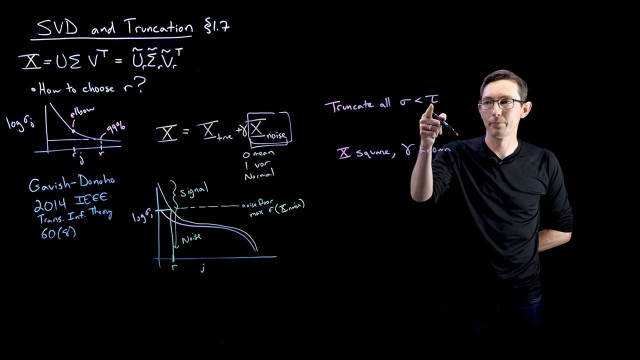
SVD and Optimal Truncation
11 min
Intermediate
Video
Theory
This video describes how to truncate the singular value decomposition (SVD) for matrix approximation.
See More
The Inverse Laplace Transform
48 min
Beginner
Video
Theory
In this video we show how to perform the inverse Laplace transform on a signal in the Laplace domain to obtain its equivalent representation in the time doma...
See More
Digital Twins
8 min
Beginner
Video
Theory
This lecture discusses the use of data-driven digital twins in advanced model-based design and engineering, and the related digital thread, which ties together the data throughout an entire...
See More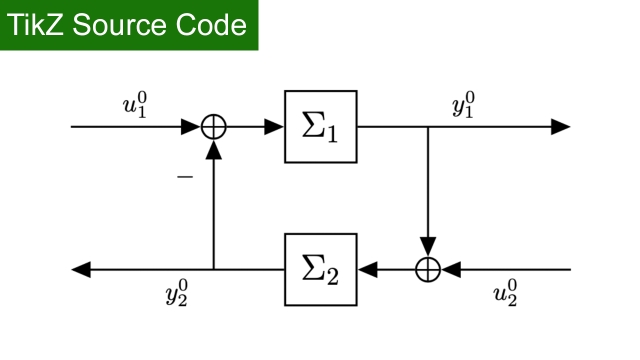
TikZ source Code: Two systems in negative feedback
Beginner
Source Code
Application
TikZ source Code: Two systems in negative feedback
See More
Final Value Theorem
33 min
Beginner
Video
Theory
In this video we discuss the Final Value Theorem. Given a signal in the Laplace domain, this allows us to predict the steady state value of the signal in th...
See More
Tuning a Fuzzy Logic Controller with Data | Fuzzy Logic, Part 4
18 min
Beginner
Video
Theory
This video covers the basics of data-driven approaches to tuning fuzzy inference systems. See what it means to find an optimal solution, which fuzzy inference parameters are being tuned...
See More
Dynamic Mode Decomposition (Examples)
7 min
Intermediate
Video
Theory
In this video, we continue to explore the dynamic mode decomposition (DMD). In particular, we look at recent methodological extensions and application areas in fluid dynamics, disease...
See More
TikZ source Code: Sliding Mode Control Example System 2
Beginner
Source Code
Application
TikZ source Code: Sliding Mode Control Example System 2
See More
Control Bootcamp: Loop shaping
7 min
Beginner
Video
Theory
This video explores shaping the loop transfer function to have desirable sensitivity and complementary sensitivity.
See More
Heat Transfer Demonstration
63 min
Beginner
Video
Theory
In this video we demonstrate heat transfer through a metal bar. By heating one side of the bar we can impose a non-uniform temperature distribution across t...
See More
Simple Vector Mechanics: Inner Product, Scalar/Vector Projection, and Cross ...
51 min
Intermediate
Video
Theory
In this video we discuss several simple vector operations such as: 1. Computing the magnitude of a vector 2. The inner/dot product 3. The scalar and vector projection 4. The cross product
See More![Denoising Data with FFT [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_359.jpg?itok=UEtxZc00 "Denoising Data with FFT [Python]")
Denoising Data with FFT [Python]
10 min
Beginner
Video
Application
This video describes how to clean data with the Fast Fourier Transform (FFT) in Python.
See More
Sparse Identification of Nonlinear Dynamics for Model Predictive Control
12 min
Intermediate
Video
Theory
This lecture shows how to use sparse identification of nonlinear dynamics with control (SINDYc) with model predictive control to control nonlinear systems purely from data.
See More
Frequency domain – tutorial 2: Fourier series
25 min
Beginner
Video
Theory
In this video, we learn Fourier series which enables us to travel from time to the frequency domain when a signal is periodic. The following materials are co...
See More
Coriolis Effect Demonstration (with Drones)
13 min
Intermediate
Video
Theory
We demonstrate how rotating reference frames give rise to the Coriolis effect and centrifugal acceleration. In this video, we approach this as a simple physics demonstration and examine...
See More
The Fourier Transform
14 min
Beginner
Video
Theory
This video will discuss the Fourier Transform, which is one of the most important coordinate transformations in all of science and engineering.
See More
Time domain - tutorial 1: what is signal processing?
1 min
Beginner
Video
Theory
In this video, we review the concept of signal processing and why it is useful to learn it. Learn Signal Processing 101 in 31 lectures covering time, frequen...
See More