

What Is Online Estimation?
Beginner
Article / Blog
Theory
This Mathworks document describes online estimation. Online estimation algorithms estimate the parameters and states of a model when new data is available during the operation of the...
See More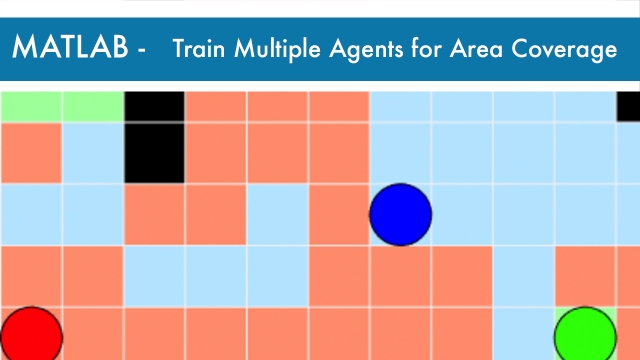
MATLAB Example: Train Multiple Agents for Area Coverage
Intermediate
Example
Application
This example demonstrates a multi-agent collaborative-competitive task in which you train three proximal policy optimization (PPO) agents to explore all areas within a grid-world environment...
See More
Robust Control, Part 3: Disk Margins for MIMO Systems
16 min
Beginner
Video
Theory
This video shows how margin can be used to assess the robustness of multi-input, multi-output systems. We’ll show how disk margin is a more complete way to represent margin for MIMO systems...
See More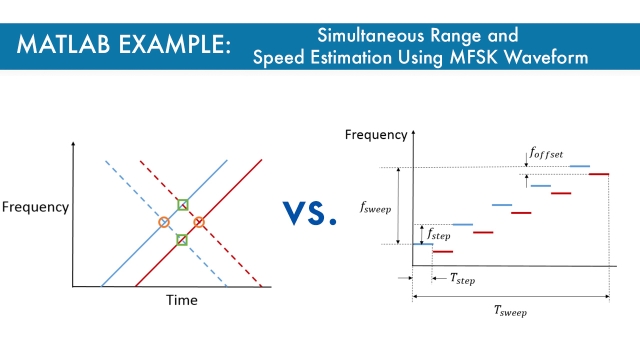
Simultaneous Range and Speed Estimation Using MFSK Waveform
Intermediate
Example
Application
This MATLAB example compares triangle sweep frequency-modulated continuous (FMCW) and multiple frequency-shift keying (MFSK) waveforms used for simultaneous range and speed estimation for...
See More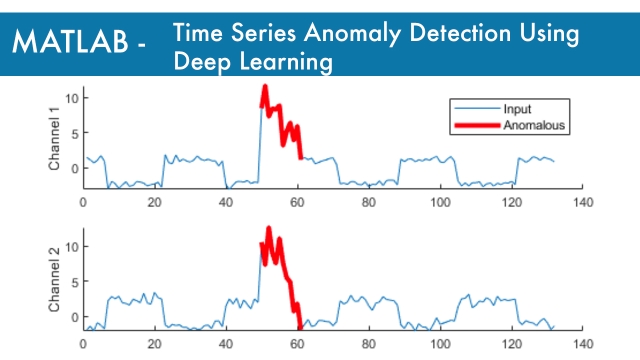
Time Series Anomaly Detection Using Deep Learning
Intermediate
Example
Demonstration
This example shows how to detect anomalies in sequence or time series data.
To detect anomalies or anomalous regions in a collection of sequences or time series data, you can use an...
See More
So You Want to be a Systems Engineer
53 min
Beginner
Video
Theory
A presentation by Gentry Lee on what qualities and characteristics make a great systems engineer. At the time of the presentation, Gentry Lee was the Chief Engineer for the Solar System...
See More
Interactive Tool about control signal saturation (windup) with PID control
Intermediate
App
Application
The purpose of this module is to give a familiarity with the phenomenon of integral windup and a method for avoiding it. The module shows process outputs and control signals for unlimited...
See More
A* Pathfinding (E01: algorithm explanation)
12 min
Beginner
Video
Theory
Welcome to the first part in a series teaching pathfinding for video games. In this episode we take a look at the A* algorithm and how it works.
See More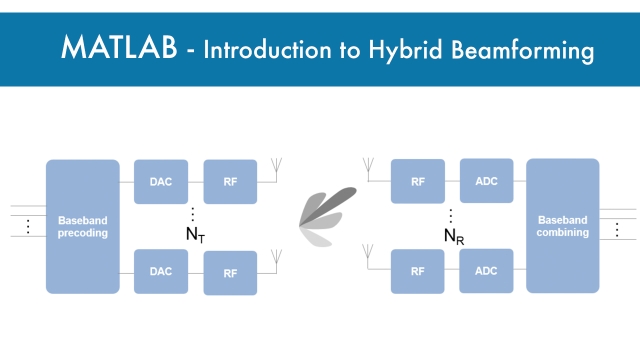
Introduction to Hybrid Beamforming
Beginner
Example
Application
This MATLAB example introduces the basic concept of hybrid beamforming and shows how to simulate such a system.
See More![The Kalman Filter [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_382.jpg?itok=BhYaUiZA "The Kalman Filter [Control Bootcamp]")
The Kalman Filter [Control Bootcamp]
6 min
Beginner
Video
Theory
Here, we discuss the Kalman Filter, which is an optimal full-state estimator, given Gaussian white noise disturbances and measurement noise.
See More
Orifice Calibration
15 min
Intermediate
Article / Blog
Application
The ISO method for orifice design and calibration is grounded in the ideal square-root relation between pressure drop and flow rate, specifies the in-pipe structure for an orifice, and...
See More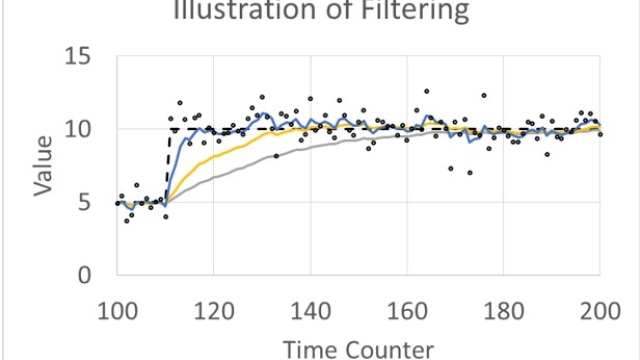
First-Order Filters
Beginner
Article / Blog
Application
Use data filters to temper noise - relation of options to lag and variance reduction
See More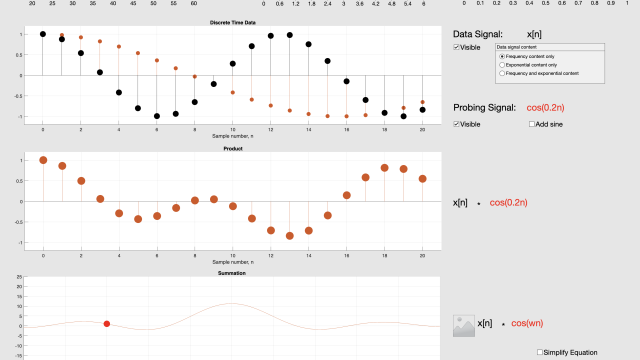
Discrete-Time Fourier Transform MATLAB App
Intermediate
App
Demonstration
This is the app that Brian Douglas created for his MATLAB Tech Talk video on the Z-transform.
See More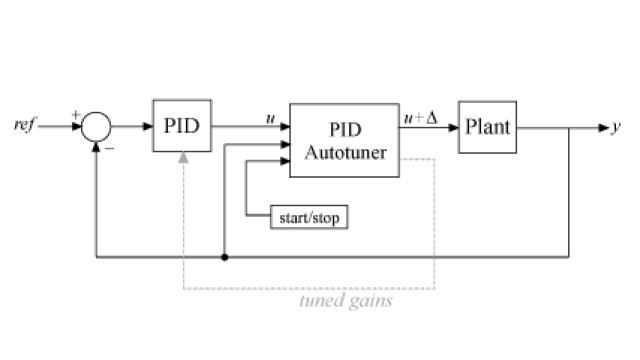
Online Tuning using Simulink’s Closed-Loop PID Autotuner Block
30 min
Intermediate
Article / Blog
Application
Learn how to conduct an online tuning of a PI-speed controller using the MATLAB/Simulink Closed-Loop PID Autotuner Block. Tuned controller is validated on a Quanser QLabs Virtual QUBE-Servo...
See More
OIT System Design Laboratory (Japanese)
Beginner
Video
Demonstration
A collection of video lectures from OIT SDL.
See More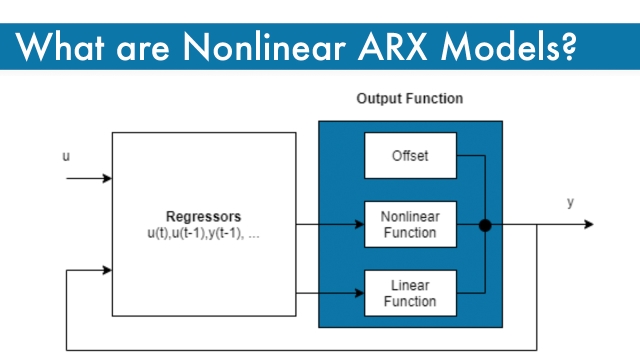
What are Nonlinear ARX Models?
Intermediate
Article / Blog
Theory
This Mathworks page provides an overview of Nonlinear ARX Models.Nonlinear ARX models extend the linear ARX models to the nonlinear case. The structure of these models enables you to model...
See More
What Is a Control System and Why Should I Care? (Part 1)
38 min
Beginner
Video
Demonstration
This video is the first of a two part series. It in introduces the basic concepts of feedback with lots of visual examples. The idea is to show that not only are these principles...
See More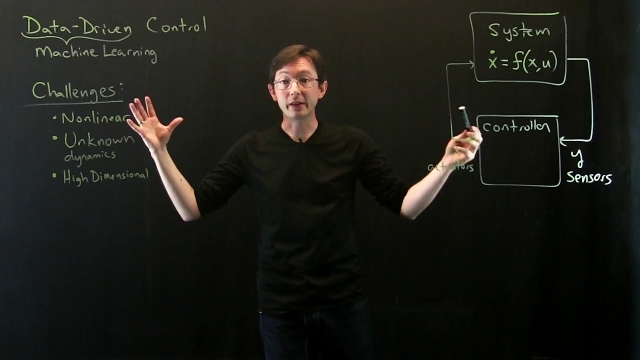
Data-Driven Control: Overview
24 min
Beginner
Video
Theory
Overview lecture for series on data-driven control. In this lecture, we discuss how machine learning optimization can be used to discover models and effective controllers directly from data...
See More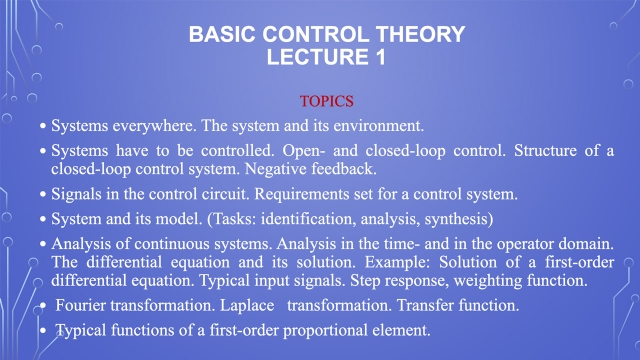
Basic course of control theory (Hungarian and English)
Beginner
Article / Blog
Theory
The basic course of control theory is taught in the 3rd year for the students specialized in information technology at the Faculty of Electrical Engineering and Informatics of the Budapest...
See More
Model-Based Reinforcement Learning: Theory and Practice
Intermediate
Article / Blog
Theory
Blog post by Michael Janner of Berkeley Artificial Intelligence Research on model-based reinforcement learning.
See More
Robust Control, Part 4: Working with Parameter Uncertainty
13 min
Beginner
Video
Theory
The previous two videos showed a few different ways to quantify how robust a system is to model and plant uncertainty by looking at how much input and output variation it can handle before...
See More![Linearizing Around a Fixed Point [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_442.jpg?itok=nt2vg0vl "Linearizing Around a Fixed Point [Control Bootcamp]")
Linearizing Around a Fixed Point [Control Bootcamp]
30 min
Beginner
Video
Theory
This lecture describes how to obtain linear system of equations for a nonlinear system by linearizing about a fixed point. This is worked out for the simple pendulum "by-hand" and in...
See More
Adaptive Control (Part II) —Modeling the X-15’s Adaptive Flight Control Syst...
Intermediate
Article / Blog
Theory
This blog post shows how to build from scratch a Simulink model of the famous MH-96, the X-15's Adaptive Flight Control System
See More
3D Kinematics, Free Falling, Reference Frames
53 min
Intermediate
Video
Theory
Walter Lewin is one of the most reputed professors and was a former lecturer at MIT. His free to watch series on YouTube titled 8.01 is an excellent one for undergrads and high school...
See More
Introduction to Radar Systems: Target Radar Cross Section
Beginner
Presentation
Theory
This course is presented by Robert M. O'Donnell, a former researcher at MIT Lincoln Laboratory, and is designed to instill a basic working knowledge of radar systems.
The set of 10 lectures...
See More