

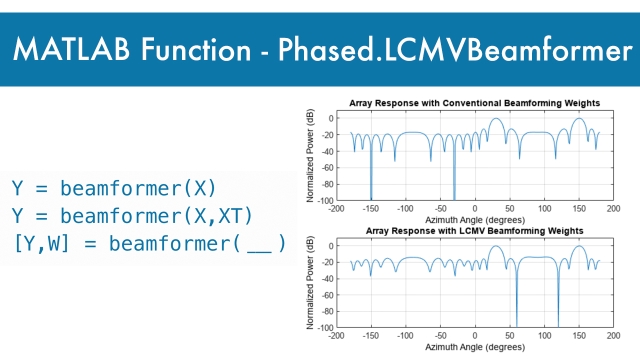
MATLAB function: phased.LCMVBeamformer
Intermediate
Article / Blog
Application
The phased.LCMVBeamformer object implements a narrowband linear-constraint minimum-variance (LCMV) beamformer for a sensor array. The LCMV beamformer belongs to the family of constrained...
See More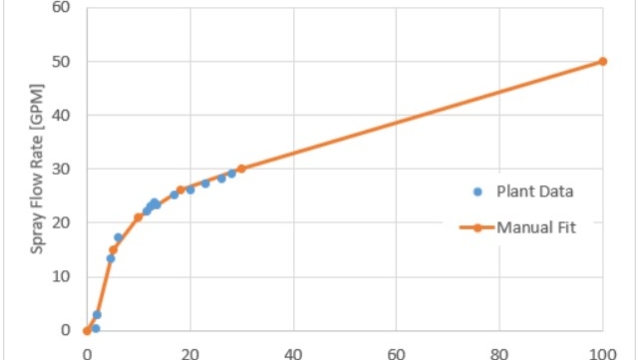
Output Characterization to Linearize a Loop - Control valve application
20 min
Intermediate
Article / Blog
Application
This application paper explains how a control valve created nonlinearity in a loop and how output characterization solved the problem
See More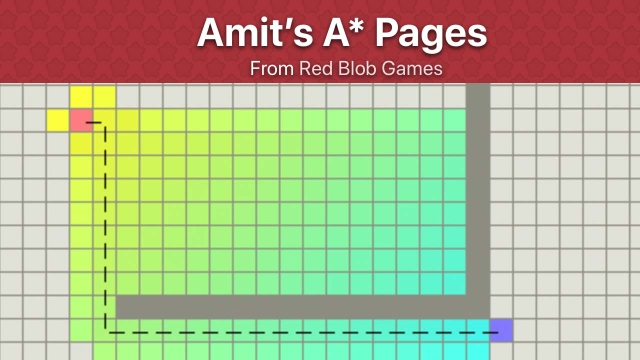
Pathfinding with A*
60 min
Beginner
Article / Blog
Application
An interactive visual explanation of the A* pathfinding algorithm. This resource uses motivating examples from computer games.
See More

Real-Time Software Implementation of Analog Filters
14 min
Intermediate
Video
Application
Modelling analog filters, discretisation, and implementation of the digitally-equivalent filters on a real-time, embedded system (STM32). Includes theory, DSP, firmware, and results.
See More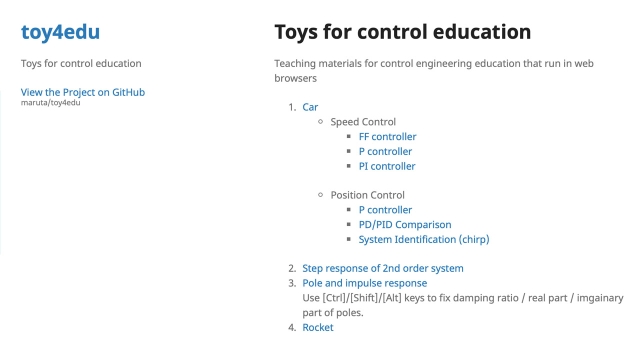
Toys for Control Education
Intermediate
App
Theory
Teaching materials for control engineering education that run in web browsers. Speed control, position control, step response of 2nd order system, pole and impulse response, and rocket.
See More![Pole Placement for the Inverted Pendulum on a Cart [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_490.jpg?itok=qWteM4RS "Pole Placement for the Inverted Pendulum on a Cart [Control Bootcamp]")
Pole Placement for the Inverted Pendulum on a Cart [Control Bootcamp]
12 min
Beginner
Video
Theory
Here we use the 'place' command in Matlab to design full-state feedback gains to specify the eigenvalues of the closed-loop system. This is demonstrated on the inverted pendulum on a cart.
See More
Základy automatizácie a teórie systémov – videokurz (Slovak)
Beginner
Article / Blog
Theory
Pozrite si videokurz zo základov teórie systémov a automatizácie. Náš kurz má 7 lekcií.
See More
Machine Learning Control: Overview
10 min
Beginner
Video
Theory
This lecture provides an overview of how to use machine learning optimization directly to design control laws, without the need for a model of the dynamics.
See More
TCLab: An Inexpensive Experimental Platform for Students to Learn Feedback
5 min
Beginner
Video
Demonstration
The temperature control lab (TCLab) reinforces process feedback control with real data. The TCLab hardware consists of an Arduino® shield that fits onto a standard Arduino Leonardo...
See More
Online and Recursive System Identification | System Identification, Part 4
19 min
Beginner
Video
Theory
Online system identification algorithms estimate the parameters and states of a model as new data is measured and available in real-time or near real-time. Brian Douglas covers what online...
See More
Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields...
Beginner
Book
Theory
From the reviews: "This book is concerned with the application of methods from dynamical systems and bifurcation theories to the study of nonlinear oscillations. Chapter 1 provides a review...
See More
The Linear Quadratic Regulator
Beginner
Article / Blog
Theory
In these notes, we will derive the solution to the finite-horizon linear quadratic regulator (LQR) problem in several different ways. Fundamentally, LQR can be viewed as a large least...
See More
Nyquist Stability Criterion
15 min
Beginner
Article / Blog
Theory
The Wikipedia article on Nyquist Stability Criterion. This covers the Nyquist plot, the Cauchy argument principle, and the stability criterion itself. A mathematical derivation is also...
See More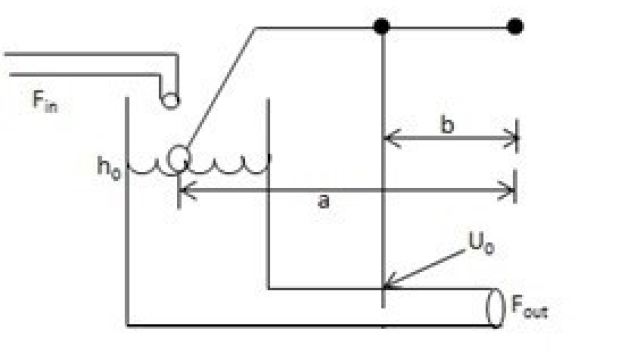
Understanding P, I, and D
30 min
Intermediate
Article / Blog
Theory
Understanding what the proportional, integral, and derivative terms do within the PID controller is essential to choose appropriate action, trouble shoot controllers, chose appropriate...
See More
Control System Lectures - Bode Plots, Introduction
12 min
Beginner
Video
Theory
This lecture is an introduction to frequency response methods, and in particular describes the Bode plot. I go through how it is generated and why we use it to visualize the frequency...
See More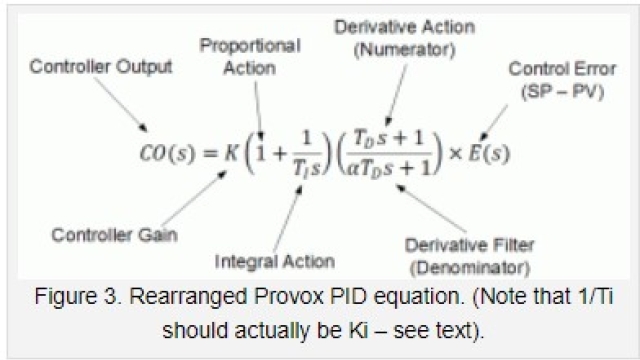
Decoding a Laplace Representation of a Controller
20 min
Intermediate
Article / Blog
Application
A how to relate the Laplace notation to the PID controller variation and features
See More
Intro to Data Science: What is Data Science?
8 min
Beginner
Video
Theory
This lecture provides an overview of the various components of data science, including data collection, cleaning, and curation, along with visualization, analysis, and machine learning (i.e...
See More
Data-Driven Control: Linear System Identification
20 min
Beginner
Video
Theory
Overview lecture on linear system identification and model reduction. This lecture discusses how we obtain reduced-order models from data that optimally capture input--output dynamics.
See More
Video Lectures on Automatic Control
Beginner
Video
Theory
A collection of 32 video lectures on automatic control by Dr. Rajesh Joseph Abraham.
See More
Data based modeling of nonlinear dynamic systems using System Identification...
Intermediate
Software
Demonstration
Using an engine throttle valve modeling example, this demo shares some perspectives on creation of nonlinear models of dynamic systems from the measurements of its input and outputs. It...
See More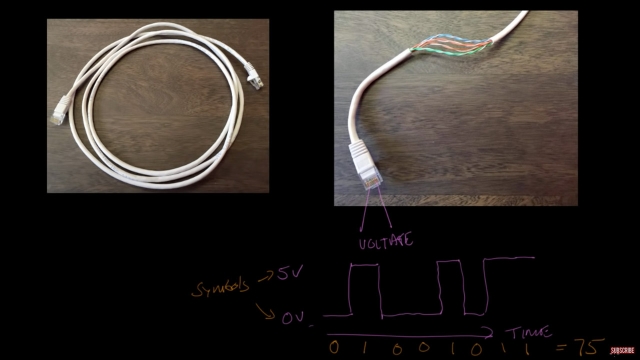
Sending digital information over a wire | Networking tutorial (1 of 13)
4 min
Beginner
Video
Theory
This video lecture is the beginning of an exploration of computer networking with the basics of sending digital information with a copper wire.
![Principal Component Analysis (PCA) 2 [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_494.jpg?itok=Q2x6S-Uj "Principal Component Analysis (PCA) 2 [Python]")
Principal Component Analysis (PCA) 2 [Python]
7 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used for principal component analysis (PCA) in Python (part 2).
See More
Yann LeCun’s Deep Learning Course at CDS
Intermediate
Course
Theory
This course concerns the latest techniques in deep learning and representation learning, focusing on supervised and unsupervised deep learning, embedding methods, metric learning...
See More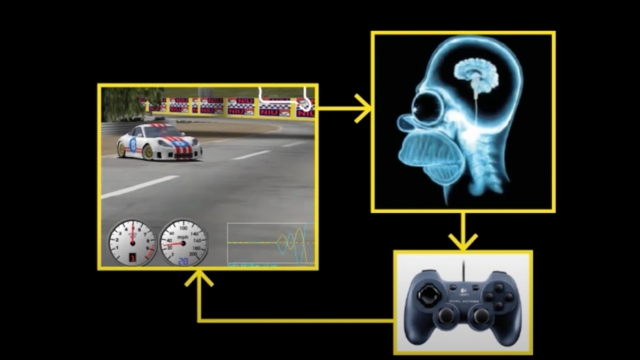
Learning Dynamic Systems & Control Engineering with a Video Game
Intermediate
Video
Demonstration
Engineering Students at Northern Illinois University are learning one of their core subjects, Dynamic Systems & Control, with the aid of a video game.
See More
Machine Learning: What is easy, medium, and hard?
38 min
Beginner
Video
Theory
This video gives a brief overview of what is easy, medium, and hard in machine learning, explored through case studies. Progress in machine learning is rapidly advancing, and changing the...
See More