

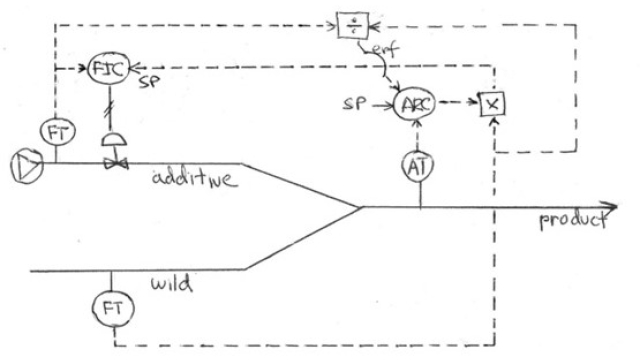
Ratio Control and Scaled Signal Calculations
15 min
Intermediate
Article / Blog
Application
When and how to use ratio, and how to implement within standard scaled signals
See More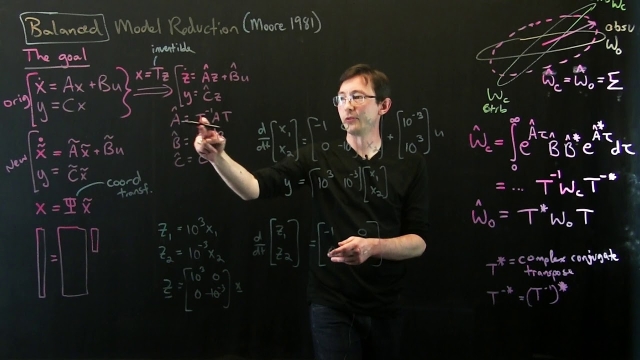
Data-Driven Control: Balancing Example
7 min
Intermediate
Video
Application
In this lecture, we give an example of how a change of coordinates can balance the controllability and observability of an input—output system.
See More
Dynamic Mode Decomposition (Code)
8 min
Intermediate
Video
Application
In this video, we code up the dynamic mode decomposition (DMD) in Matlab and use it to analyze the fluid flow past a circular cylinder at low Reynolds number.
See More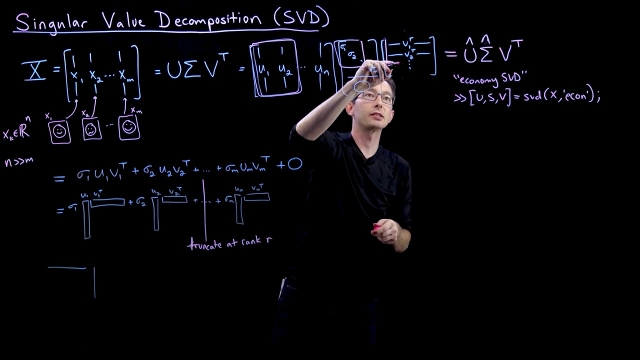
Singular Value Decomposition (SVD): Matrix Approximation
14 min
Intermediate
Video
Theory
This video describes how the singular value decomposition (SVD) can be used for matrix approximation.
See More![Principal Component Analysis (PCA) [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_493.jpg?itok=CnTZy7T9 "Principal Component Analysis (PCA) [Matlab]")
Principal Component Analysis (PCA) [Matlab]
15 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used for principal component analysis (PCA) in Matlab.
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 4 - Model Fre...
78 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

RL Course by David Silver - Lecture 10: Classic Games
111 min
Intermediate
Video
Theory
An overview of Game Theory, minimax search, self-play and imperfect information games.
See More
Building a Matlab/Simulink Model of an Aircraft: the Research Civil Aircraf...
51 min
Intermediate
Video
Theory
In this video we implement the RCAM model as a Matlab script that is called from a Simulink model. The result is a fully encapsulated Simulink model of a nonlinear, 6 DOF aircraft. Please...
See More
Data-Driven Control: Eigensystem Realization Algorithm
12 min
Intermediate
Video
Theory
In this lecture, we introduce the eigensystem realization algorithm (ERA), which is a purely data-driven algorithm to obtain balanced input—output models from impulse response data. ERA was...
See More
Parseval's Theorem
5 min
Intermediate
Video
Theory
Parseval's theorem is an important result in Fourier analysis that can be used to put guarantees on the accuracy of signal approximation in the Fourier domain.
See More![SVD: Eigenfaces 1 [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_413.jpg?itok=Ieh39q9N)
SVD: Eigenfaces 1 [Python]
4 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used to efficiently represent human faces, in the so-called "eigenfaces" (Python code, part 1).
See More
Identifying Dominant Balance Physics from Data - Jared Callaham
12 min
Intermediate
Video
Theory
This video illustrates a new algorithm to identify local dominant physical balance relations from multiscale spatiotemporal data.
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 16 - Monte Ca...
67 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group
Using a Homogeneous Transformation Matrix to Combine Rotation and Translatio...
63 min
Intermediate
Video
Theory
In this video we discuss how to properly deal with coordinate frames that are both rotated and translated from one another. We develop a homogeneous transformation matrix which combines a...
See More
Virtual Laboratory for Vibrations and Control Theory
Intermediate
Virtual Lab
Application
This virtual lab developed in Matlab Simscape provides an innovative tool for learning and teaching fundamentals of mechanical vibrations including mass-spring-damper systems.
See More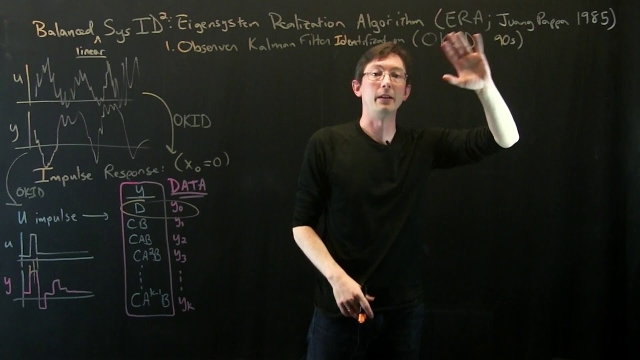
Data-Driven Control: Observer Kalman Filter Identification
12 min
Intermediate
Video
Theory
In this lecture, we introduce the observer Kalman filter identification (OKID) algorithm. OKID takes natural input--output data from a system and estimates the impulse response, for later...
See More")
Koopman Spectral Analysis (Representations)
16 min
Intermediate
Video
Theory
In this video, we explore how to obtain finite-dimensional representations of the Koopman operator from data, using regression.
See More![SVD: Eigenfaces 4 [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_418.jpg?itok=dWTN1neh)
SVD: Eigenfaces 4 [Matlab]
6 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used to efficiently represent human faces, in the so-called "eigenfaces" (Matlab code, part 4).
See More![Unitary Transformations and the SVD [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_428.jpg?itok=YznjC6fr)
Unitary Transformations and the SVD [Python]
6 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) is related to unitary transformations, with Python code.
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 3 - Model-Fr...
73 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

RL Course by David Silver - Lecture 4: Model-Free Prediction
97 min
Intermediate
Video
Theory
An introduction to Monte-Carlo Learning and Temporal Difference Learning
See More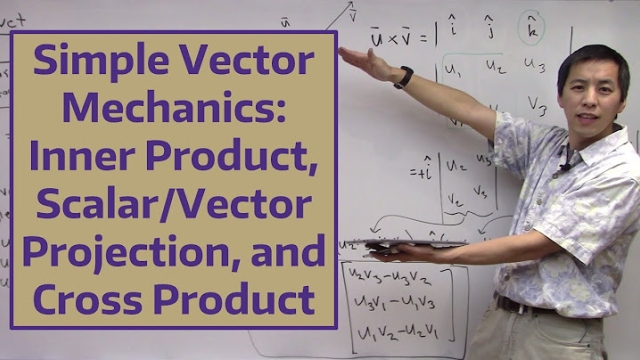
Simple Vector Mechanics: Inner Product, Scalar/Vector Projection, and Cross ...
51 min
Intermediate
Video
Theory
In this video we discuss several simple vector operations such as: 1. Computing the magnitude of a vector 2. The inner/dot product 3. The scalar and vector projection 4. The cross product
See More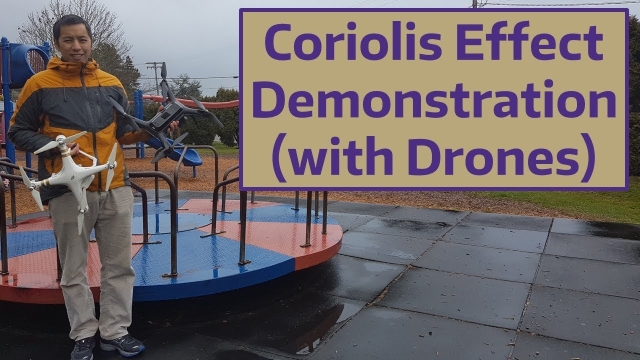
Coriolis Effect Demonstration (with Drones)
13 min
Intermediate
Video
Theory
We demonstrate how rotating reference frames give rise to the Coriolis effect and centrifugal acceleration. In this video, we approach this as a simple physics demonstration and examine...
See More
Data-Driven Control: Balanced Truncation Example
10 min
Intermediate
Video
Application
In this lecture, we explore the balanced truncation procedure on an example in Matlab. In particular, we demonstrate the ability of a balancing transformation to make the controllability...
See More