


Python Control Systems Library
Intermediate
Software
Application
The python-control package is a set of python classes and functions that implement common operations for the analysis and design of feedback control systems. The initial goal is to implement...
See More
Interpreting Lines on PFDs and P&IDs
20 min
Intermediate
Article / Blog
Application
Lines on a process flow diagram (PFD) indicate material flow. In contrast, on a piping and instrument diagram (P&ID), the control overlay for the PFD, the lines represent information flow. ...
See More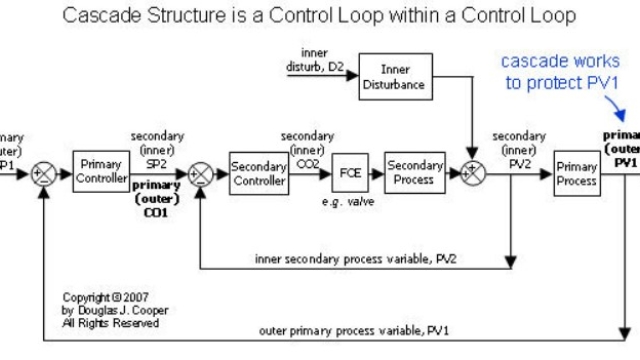
Cascade Control 2
Intermediate
Article / Blog
Application
An Implementation Recipe for Cascade Control
See More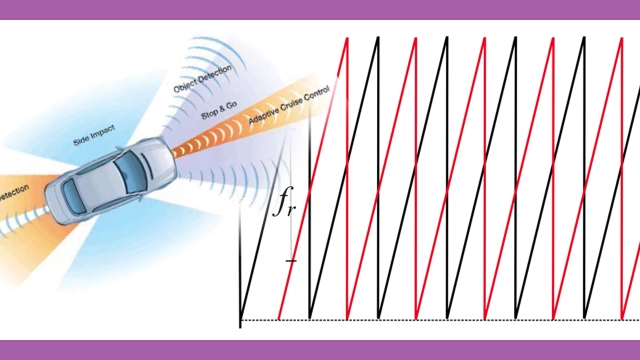
Fast chirp FMCW Radar in automotive applications
Advanced
Peer Reviewed Paper
Theory
FMCW (frequency-modulated continuous wave radar) modulations have been popularly implemented in the automotive radar applications. This document demonstrates system requirement for a new...
See More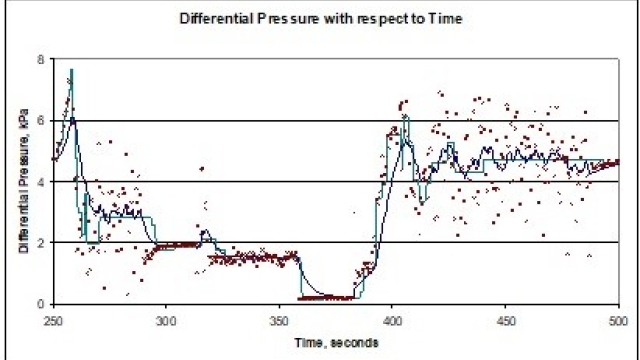
A Statistical Noise Filter
20 min
Intermediate
Article / Blog
Application
A noise filter that uses Statistical Process Control (SPC) techniques to temper tampering
See More
Full Stack Deep Learning
Intermediate
Course
Theory
There are many great courses to learn how to train deep neural networks. However, training the model is just one part of shipping a deep learning project. This course teaches full-stack...
See More
Averaging and Vibrational Control of Mechanical Systems
Intermediate
Peer Reviewed Paper
Theory
Abstract. This paper investigates averaging theory and oscillatory control for a large class of mechanical systems. A link between averaging and controllability theory is presented by...
See More
Robotarium by Georgia Tech
0 min
Intermediate
Remote Lab
Application
The Robotarium project provides a remotely accessible swarm robotics research platform that remains freely accessible to anyone. Currently, Robotics research requires significant investments...
See More
MATLAB function: phased.LCMVBeamformer
Intermediate
Article / Blog
Application
The phased.LCMVBeamformer object implements a narrowband linear-constraint minimum-variance (LCMV) beamformer for a sensor array. The LCMV beamformer belongs to the family of constrained...
See More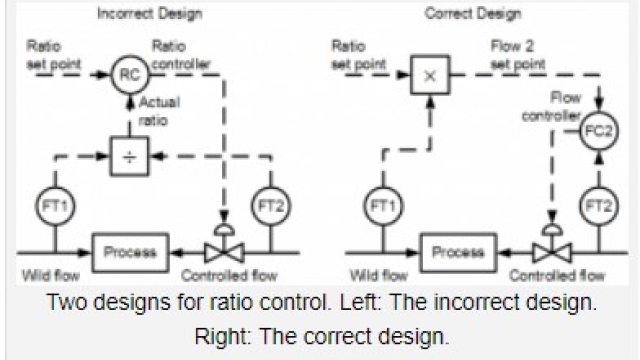
Ratio Control - the right and wrong approach
15 min
Intermediate
Article / Blog
Application
A discussion as to why the ratio should be the MV (controller output) not the CV.
See More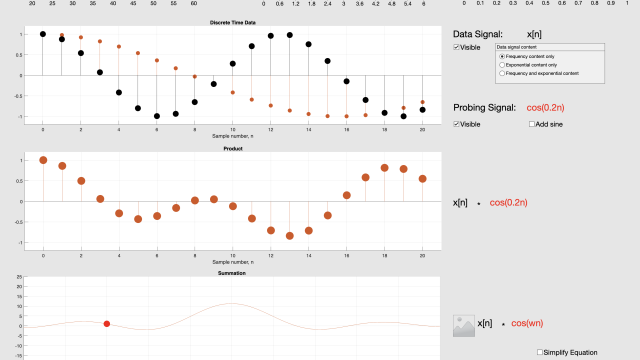
Discrete-Time Fourier Transform MATLAB App
Intermediate
App
Demonstration
This is the app that Brian Douglas created for his MATLAB Tech Talk video on the Z-transform.
See More
Real-Time Software Implementation of Analog Filters
14 min
Intermediate
Video
Application
Modelling analog filters, discretisation, and implementation of the digitally-equivalent filters on a real-time, embedded system (STM32). Includes theory, DSP, firmware, and results.
See More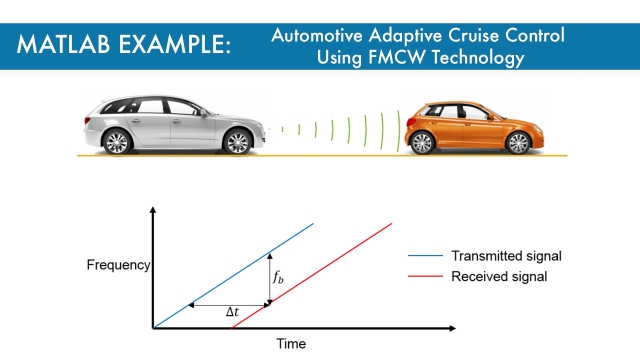
Automotive Adaptive Cruise Control Using FMCW Technology
Intermediate
Example
Application
This MATLAB example shows how to model an automotive adaptive cruise control system using the frequency modulated continuous wave (FMCW) technique. This example performs range and Doppler...
See More
Control Loop Foundation Batch and Continuous Processes - Interactive Source ...
Intermediate
Virtual Lab
Application
Control Loop Foundation contains workshops that allow the reader to get hands on experience through this web interface. Once a lab is selected, then you may access workshop directions and...
See More
Dealing with Non-Stationarity in Multi-Agent Deep Reinforcement Learning
Intermediate
Peer Reviewed Paper
Theory
From the abstract
Recent developments in deep reinforcement learning are concerned with creating decision-making agents which can perform well in various complex domains. A particular...
See More
System Identification: Regression Models
5 min
Intermediate
Video
Theory
This lecture provides an overview of modern data-driven regression methods for linear and nonlinear system identification, based on the dynamic mode decomposition (DMD), Koopman theory, and...
See More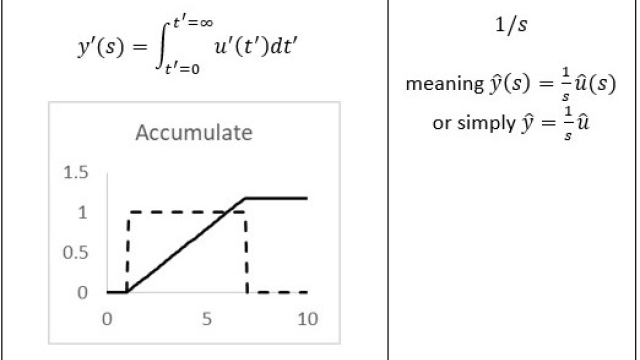
No! Not Laplace Transforms
60 min
Intermediate
Course
Theory
In my 13-year industrial career, I never used Laplace transforms. However, transfer functions and block diagram notation are efficient methods to describe dynamic behaviors, and are often...
See More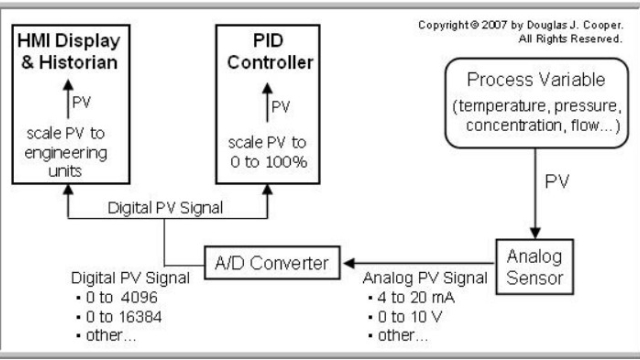
Scaled Transmission Signals, Engineering Units, and Conversions
30 min
Intermediate
Article / Blog
Application
Information is transmitted in scaled signals (4-20 mA, 3-15 psig, 0-100%, digital counts), which are also deviations from some reference vales (such as psi gage is to psia). But process...
See More
Advanced process control (APC): Theory & Applications in SAGD
Intermediate
Video
Theory
This webinar is presented by Thiago Avila and covers what APC is, why we do it, examples of APC in the SAGD industry, what optimization opportunities are available, and where this technology...
See More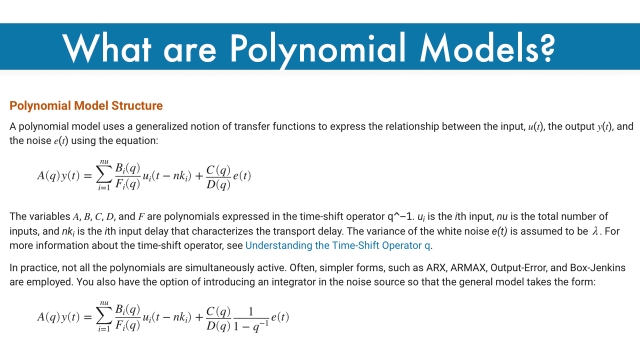
What are Polynomial Models?
Intermediate
Article / Blog
Theory
This Mathworks page provides an overview of polynomial models.
See More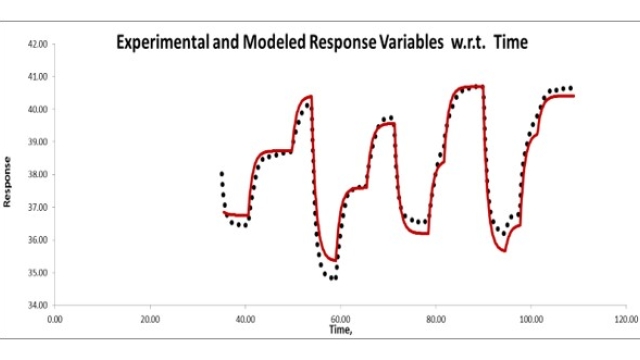
FOPDT Models from Skyline Inputs
20 min
Intermediate
Article / Blog
Application
The classic textbook method to generate FOPDT models is the reaction curve technique, a pre-computer era technique: Start from a steady state, make a step and hold in the controller output...
See More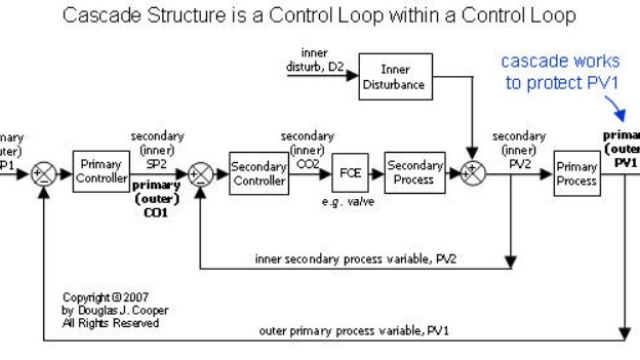
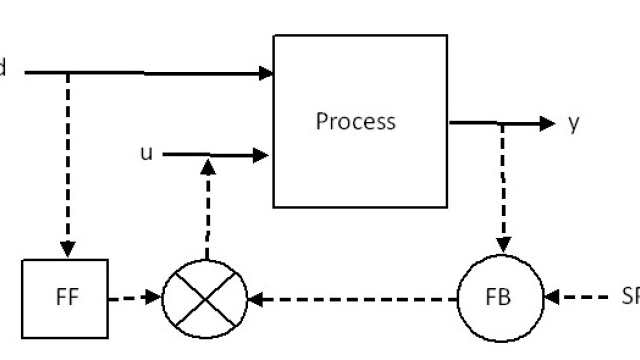
Feedforward Control
15 min
Intermediate
Article / Blog
Application
When and how to use Feedforward Control
See More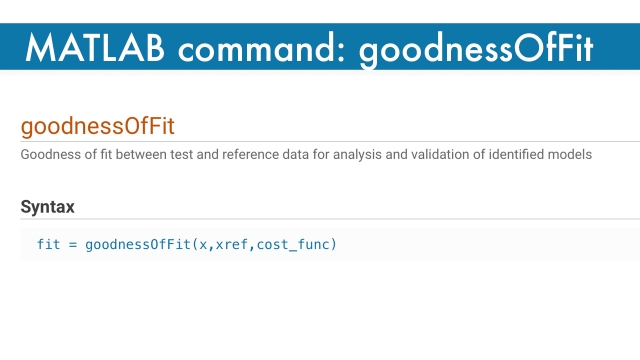
MATLAB Command: goodnessOfFit
Intermediate
Article / Blog
Application
Goodness of fit between test and reference data for analysis and validation of identified models
See More
Yann LeCun’s Deep Learning Course at CDS
Intermediate
Course
Theory
This course concerns the latest techniques in deep learning and representation learning, focusing on supervised and unsupervised deep learning, embedding methods, metric learning...
See More