

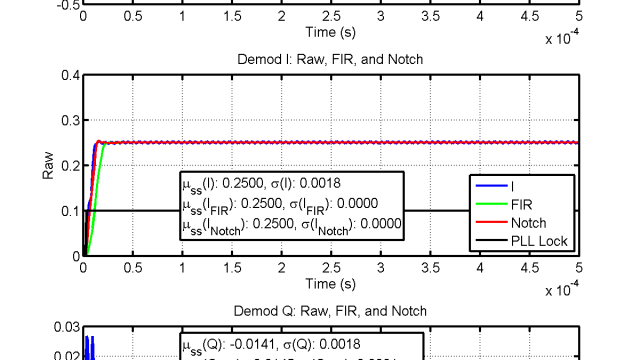
The Demod Squad: A Tutorial on the Utility and Methodologies for Using Modul...
60 min
Intermediate
Peer Reviewed Paper
Theory
This paper is a brief tutorial on methods for using modulated signals in feedback loops, and especially of the different methods and trade offs used for demodulating those signals to get...
See More![Principal Component Analysis (PCA) 1 [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/hqdefault_23.jpg?itok=ugDPjF_z "Principal Component Analysis (PCA) 1 [Python]")
Principal Component Analysis (PCA) 1 [Python]
7 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used for principal component analysis (PCA) in Python (part 1).
See More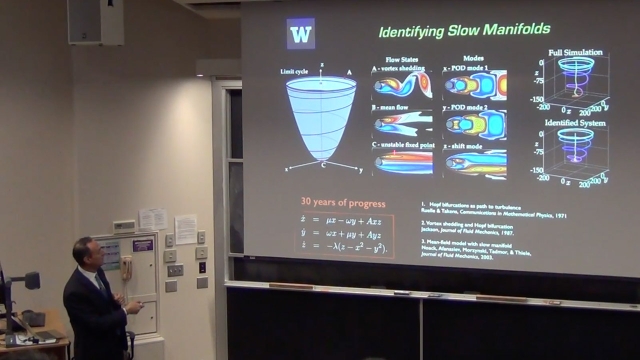
Nathan Kutz:"Data-driven Discovery of Governing Physical Laws"
73 min
Intermediate
Video
Theory
Seminar by Dr.Nathan Kutz on "Data-driven Discovery of Governing Physical Laws" on 10/31/2018 CICS Seminar Series
See More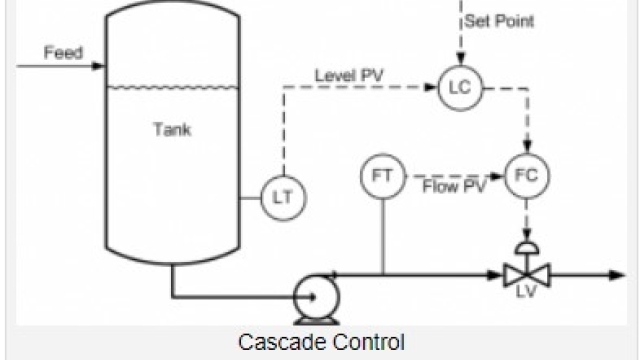
Cascade Control
30 min
Intermediate
Article / Blog
Application
What is Cascade Control and why use it?
See More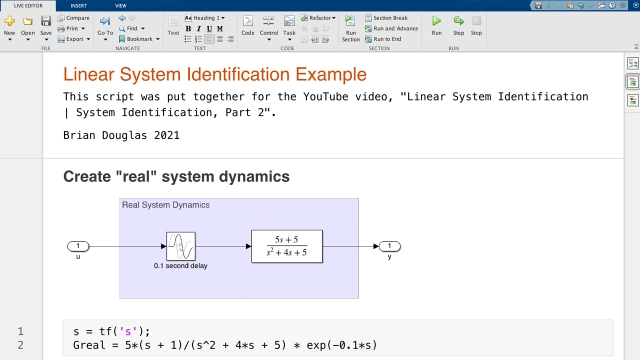
MATLAB Scripts for video "Linear System Identification | System Identificati...
Intermediate
Software
Demonstration
This Github repo contains the data files and MATLAB scripts that were used in the MATLAB Tech Talk video "Linear System Identification | System Identification, Part 2"
See More
Vibrational control of nonlinear systems: Vibrational controllability and tr...
Intermediate
Peer Reviewed Paper
Theory
In the first part of this work, the criteria for the existence of stabilizing parametric oscillations have been derived. In the present paper, the problem of choosing the stabilizing...
See More
Bridging the Gap: Using Real World Problems to Unveil Deep Control Principle...
52 min
Intermediate
Video
Application
This is a plenary lecture given at the 2020 IEEE Conference on Control Systems Technology, Montreal, Canada, August 24-26, 2020. There is no paper, but this is the video of the talk.
See More
System Identification: DMD Control Example
8 min
Intermediate
Video
Theory
This lecture gives a Matlab example of dynamic mode decomposition with control (DMDc) for full-state system identification.
See More
Bumpless Transfer and Tuning
15 min
Intermediate
Article / Blog
Application
Switching from MAN to AUTO mode or LOCAL to CASCADE or changing the controller integral time should not cause a change in the controller output, a bump. But a primitive coding of the PID...
See More
Android and iPhone E-Learning App for Nyquist Stability Criterion
Intermediate
App
Theory
In our Nyquist App, you can analyze the stability of the closed loop by using the Nyquist stability criterion. With the Nyquist stability criterion, you can determine the stability of the...
See More
PID Controller Implementation in Software
20 min
Intermediate
Video
Application
How to implement a PID controller in software using C, discussing theory and practical considerations. Demonstration of PID controller code using a custom flight simulator.
See More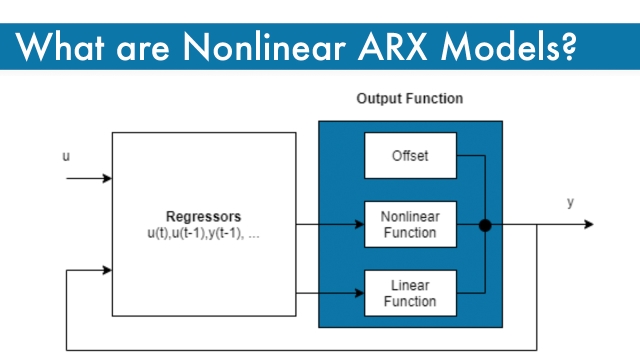
What are Nonlinear ARX Models?
Intermediate
Article / Blog
Theory
This Mathworks page provides an overview of Nonlinear ARX Models.Nonlinear ARX models extend the linear ARX models to the nonlinear case. The structure of these models enables you to model...
See More
3D Kinematics, Free Falling, Reference Frames
53 min
Intermediate
Video
Theory
Walter Lewin is one of the most reputed professors and was a former lecturer at MIT. His free to watch series on YouTube titled 8.01 is an excellent one for undergrads and high school...
See More
Orifice Calibration
15 min
Intermediate
Article / Blog
Application
The ISO method for orifice design and calibration is grounded in the ideal square-root relation between pressure drop and flow rate, specifies the in-pipe structure for an orifice, and...
See More
Interpreting Lines on PFDs and P&IDs
20 min
Intermediate
Article / Blog
Application
Lines on a process flow diagram (PFD) indicate material flow. In contrast, on a piping and instrument diagram (P&ID), the control overlay for the PFD, the lines represent information flow. ...
See More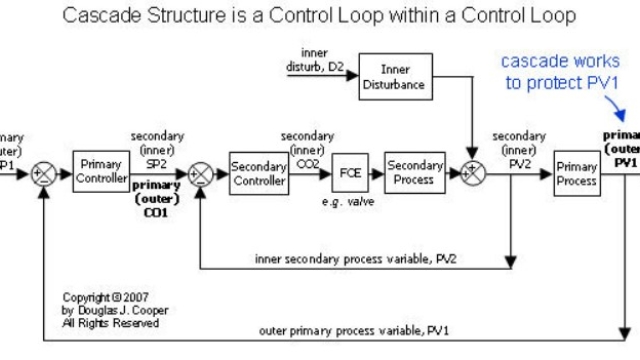
Cascade Control 2
Intermediate
Article / Blog
Application
An Implementation Recipe for Cascade Control
See More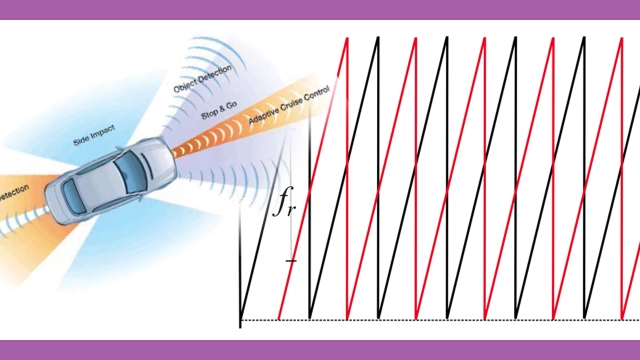
Fast chirp FMCW Radar in automotive applications
Advanced
Peer Reviewed Paper
Theory
FMCW (frequency-modulated continuous wave radar) modulations have been popularly implemented in the automotive radar applications. This document demonstrates system requirement for a new...
See More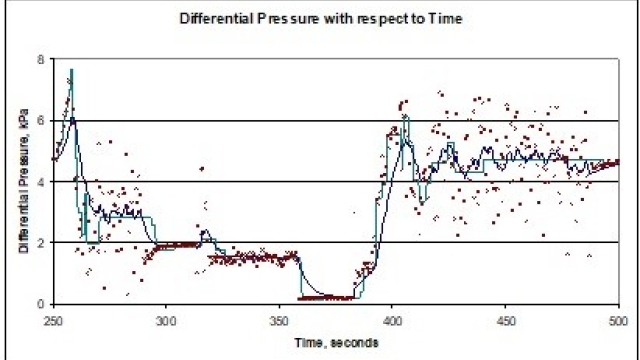
A Statistical Noise Filter
20 min
Intermediate
Article / Blog
Application
A noise filter that uses Statistical Process Control (SPC) techniques to temper tampering
See More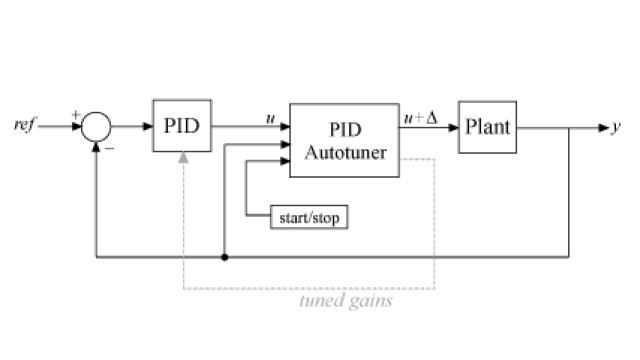
Online Tuning using Simulink’s Closed-Loop PID Autotuner Block
30 min
Intermediate
Article / Blog
Application
Learn how to conduct an online tuning of a PI-speed controller using the MATLAB/Simulink Closed-Loop PID Autotuner Block. Tuned controller is validated on a Quanser QLabs Virtual QUBE-Servo...
See More
Online Fault Detection for a DC Motor
5 min
Intermediate
Video
Application
Program embedded processors to estimate parameters and detect changes in motor dynamics in real time using System Identification Toolbox™.
See More
A Tutorial on PES Pareto Methods for Analysis of Noise Propagation in Feedba...
48 min
Intermediate
Video
Theory
This is the recorded talk of the paper by the same title.
See More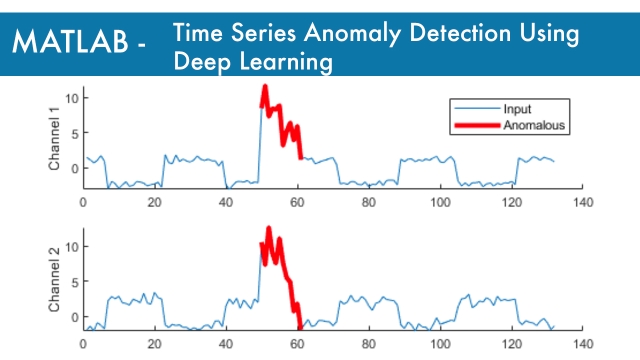
Time Series Anomaly Detection Using Deep Learning
Intermediate
Example
Demonstration
This example shows how to detect anomalies in sequence or time series data.
To detect anomalies or anomalous regions in a collection of sequences or time series data, you can use an...
See More
Python Control Systems Library
Intermediate
Software
Application
The python-control package is a set of python classes and functions that implement common operations for the analysis and design of feedback control systems. The initial goal is to implement...
See More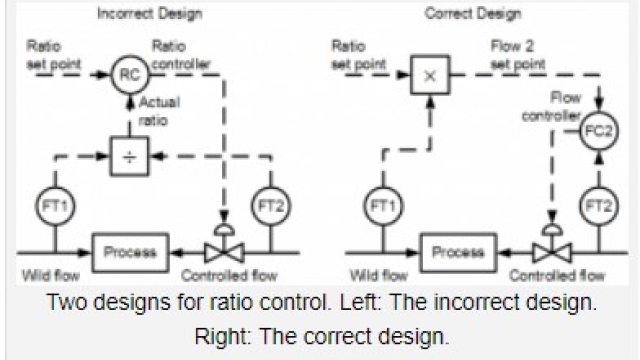
Ratio Control - the right and wrong approach
15 min
Intermediate
Article / Blog
Application
A discussion as to why the ratio should be the MV (controller output) not the CV.
See More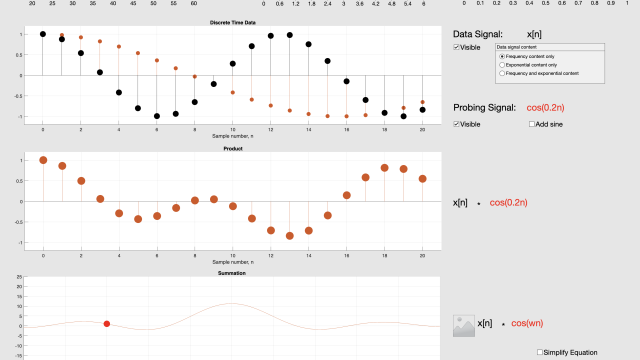
Discrete-Time Fourier Transform MATLAB App
Intermediate
App
Demonstration
This is the app that Brian Douglas created for his MATLAB Tech Talk video on the Z-transform.
See More