

![Linear Regression 2 [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_437.jpg?itok=jfYpmzNR "Linear Regression 2 [Python]")
Linear Regression 2 [Python]
5 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used for linear regression in Python (part 2).
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 1 - Introduct...
66 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

RL Course by David Silver - Lecture 7: Policy Gradient Methods
94 min
Intermediate
Video
Theory
Looks at different policy gradients, including Finite Difference, Monte-Carlo and Actor Critic.
See More
IIR Filters - Theory and Implementation (STM32)
20 min
Intermediate
Video
Application
Tutorial on IIR (Infinite Impulse Response) digital filters, including digital filtering overview, IIR filter theory, FIR vs IIR, Z-transform design/analysis, design using analogue...
See More
Data-Driven Control: BPOD and Output Projection
5 min
Intermediate
Video
Theory
In this lecture, we introduce the output projection for balancing proper orthogonal decomposition (BPOD), to reduce the number of adjoint simulations required when the number of measurements...
See More
Using a Homogeneous Transformation Matrix to Combine Rotation and Translatio...
63 min
Intermediate
Video
Theory
In this video we discuss how to properly deal with coordinate frames that are both rotated and translated from one another. We develop a homogeneous transformation matrix which combines a...
See More![SVD: Eigenfaces 2 [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_415.jpg?itok=9rg4zY8s)
SVD: Eigenfaces 2 [Python]
10 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used to efficiently represent human faces, in the so-called "eigenfaces" (Python code, part 2).
See More
Using Antenna Toolbox with Phased Array Systems
Intermediate
Example
Theory
When you create antenna arrays such as a uniform linear array (ULA), you can use antennas that are built into Phased Array System Toolbox™. Alternatively, you can use Antenna Toolbox™...
See More

Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 10 - Policy G...
81 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

Smart Projectile State Estimation Using Evidence Theory
Intermediate
Peer Reviewed Paper
Theory
This journal article provides a very good practical understanding of Dempster-Shafer theory using sensor fusion and state estimation as the backdrop.
See More
FreeFlyer Aerodynamic Simulation Software
Advanced
Software
Application
FreeFlyer® is an aerodynamic simulation software for space mission design, analysis and operations. It is a commercial software used in actual missions. Free for students, paid for startups...
See More
Simple Vector Mechanics: Inner Product, Scalar/Vector Projection, and Cross ...
51 min
Intermediate
Video
Theory
In this video we discuss several simple vector operations such as: 1. Computing the magnitude of a vector 2. The inner/dot product 3. The scalar and vector projection 4. The cross product
See More
Data-Driven Control: ERA and the Discrete-Time Impulse Response
5 min
Intermediate
Video
Theory
In this lecture, we describe how the discrete-time impulse response is used in the eigensystem realization algorithm (ERA).
See More
Coriolis Effect Demonstration (with Drones)
13 min
Intermediate
Video
Theory
We demonstrate how rotating reference frames give rise to the Coriolis effect and centrifugal acceleration. In this video, we approach this as a simple physics demonstration and examine...
See More
Randomized Singular Value Decomposition (SVD)
13 min
Intermediate
Video
Theory
This video describes how to use recent techniques in randomized linear algebra to efficiently compute the singular value decomposition (SVD) for extremely large matrices.
See More![SVD: Optimal Truncation [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_424.jpg?itok=UV9sowPB)
SVD: Optimal Truncation [Python]
8 min
Intermediate
Video
Application
This video describes how to optimally truncate the singular value decomposition (SVD) for noisy data (Python code).
See More
RL Course by David Silver - Lecture 1: Introduction to Reinforcement Learnin...
88 min
Intermediate
Video
Theory
Introduces reinforcment learning (RL), an overview of agents and some classic RL problems.
See More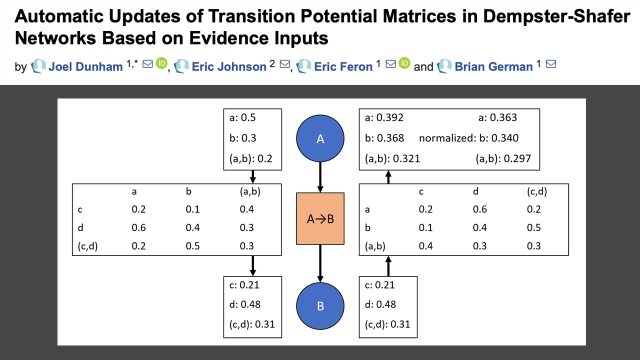
Automatic Updates of Transition Potential Matrices in Dempster-Shafer Networ...
Advanced
Peer Reviewed Paper
Theory
Journal article that develops an evidential reasoning network capable of learning/updating the relationships between Frames of Discernment (the sets over which Dempster-Shafer reasons that...
See More
Data-Driven Control: Balanced Proper Orthogonal Decomposition
27 min
Intermediate
Video
Theory
In this lecture, we introduce the balancing proper orthogonal decomposition (BPOD) to approximate balanced truncation for high-dimensional systems.
See More
Trimming a Model of a Dynamic System Using Numerical Optimization
60 min
Intermediate
Video
Theory
In this video we show how to find a trim point of a dynamic system using numerical optimization techniques. We generate a cost function that corresponds to a straight and level flight...
See More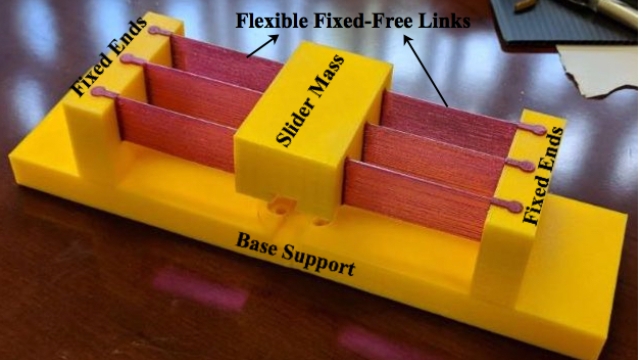
3D Printed Laboratory Equipment to Study Fundamentals of Vibrations: Complia...
180 min
Intermediate
Project
Application
This low-cost, portable, and 3D-Printed Laboratory Equipment (3D-PLE) can be utilized to achieve the following learning outcomes:
- Derive the equation of motion of a translational...