

A New Approach to Linear Filtering and Prediction Problems
Advanced
Peer Reviewed Paper
Theory
A transcription of R.E. Kalman's seminal paper. Transcribed by John Lukesh, 20 January 2002
The classical filtering and prediction problem is re-examined using the Bode- Shannon...
See More
TinyEKF: Lightweight C/C++ Extended Kalman Filter with Python for prototypin...
Intermediate
Software
Application
TinyEKF is a simple C/C++ implementation of the Extended Kalman Filter that is general enough to use on different projects. In order to make it practical for running on Arduino, STM32, and...
See More
Linear Algebra Review
Intermediate
Course
Theory
This short course is a quick review of linear algebra, intended for students who have already taken a previous course in linear algebra or have some experience with vectors and matrices. The...
See More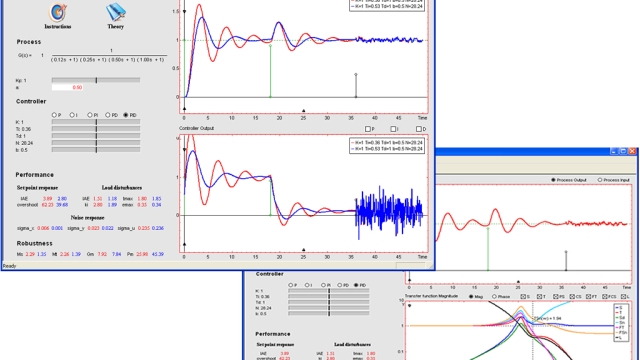
Interactive Tool for PID understanding
Intermediate
App
Application
The module PID Basics is designed to explore the properties of a simple feedback loop by showing the time and frequency responses of a closed-loop system and demonstrating how these...
See More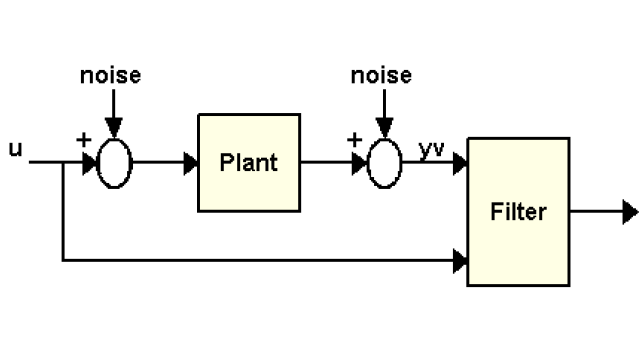
Kalman Filter Design
30 min
Intermediate
Article / Blog
Application
This example shows how to perform Kalman filtering. Both a steady state filter and a time varying filter are designed and simulated.
See More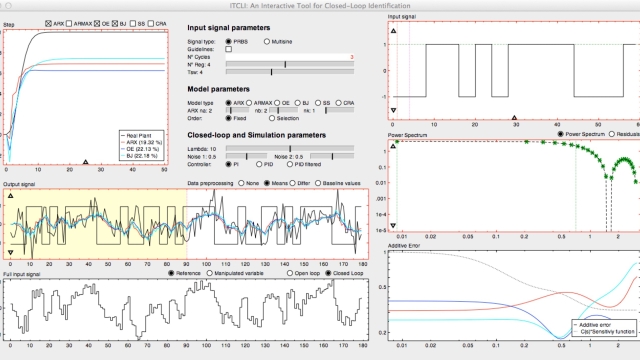
ITCLI: An Interactive Tool for Closed-Loop Identification
Intermediate
App
Application
The Interactive Tool for Closed-Loop Identification (ITCLI) is an interactive software tool for understanding SISO closed-loop identification using prediction-error techniques. The tool...
See More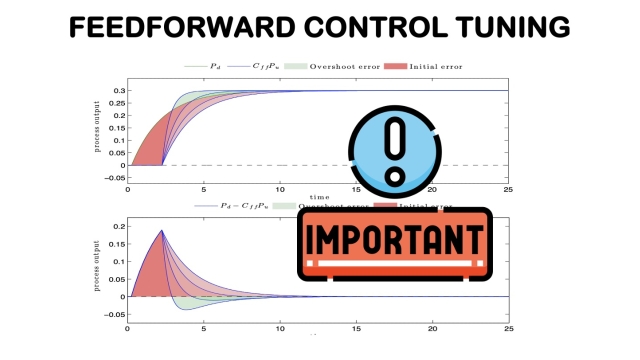
Advances in feedforward control for measurable disturbances
35 min
Intermediate
Video
Theory
The efficient compensation of load disturbances is one of the most important tasks in any control system. Most industrial processes are affected by disturbances and only feedback is commonly...
See More
Z-Transform - Practical Applications
26 min
Intermediate
Video
Application
Covering practical applications of the Z-transform used in digital signal processing, for example, stability analysis and frequency response of discrete-time systems. Theory, C code, and...
See More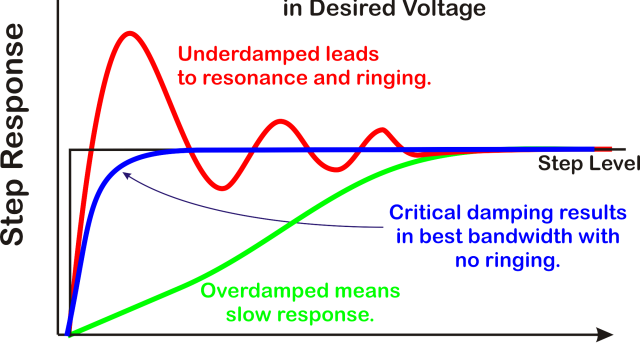
Introducing Feedback Control to Middle and High School STEM Students, Part 2...
60 min
Intermediate
Article / Blog
Demonstration
This paper was presented at the 2019 IFAC Advances on Control Education Conference (IFAC-ACE), Philadelphia, PA, USA, July 7-9, 2019, and is in the conference proceedings. This paper aims at...
See More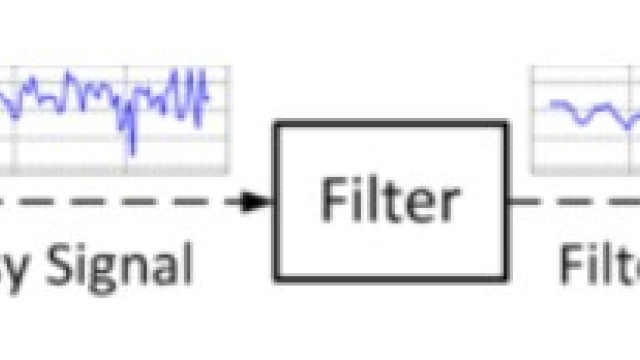
Introduction to Noise Filtering
20 min
Intermediate
Article / Blog
Application
Introduction to filtering - moving average, first-order, anti-aliasing, set point softening
See More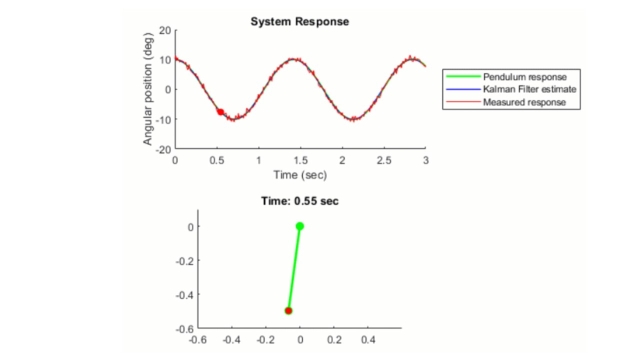
Kalman Filter Virtual Lab
Intermediate
Virtual Lab
Application
The Kalman Filter virtual laboratory contains interactive exercises that let you study linear and extended Kalman filter design for state estimation of a simple pendulum system. The virtual...
See More
Discrete Fourier Transform
Intermediate
Article / Blog
Theory
The discrete Fourier transform, or DFT, is the primary tool of digital signal processing. The foundation of the product is the fast Fourier transform (FFT), a method for computing the DFT...
See More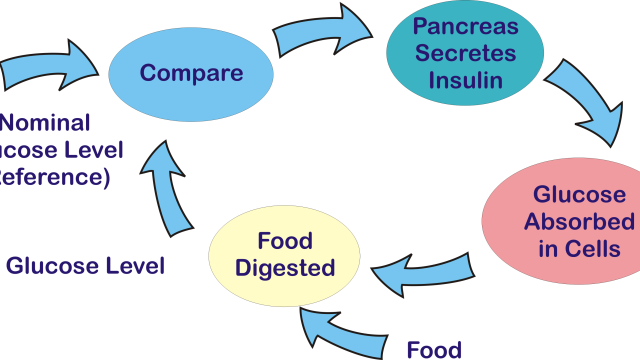
Introducing Feedback Control to Middle and High School STEM Students, Part 1...
60 min
Intermediate
Article / Blog
Demonstration
This paper was presented at the 2019 IFAC Advances on Control Education Conference (IFAC-ACE), Philadelphia, PA, USA, July 7-9, 2019, and is in the conference proceedings. This paper aims at...
See More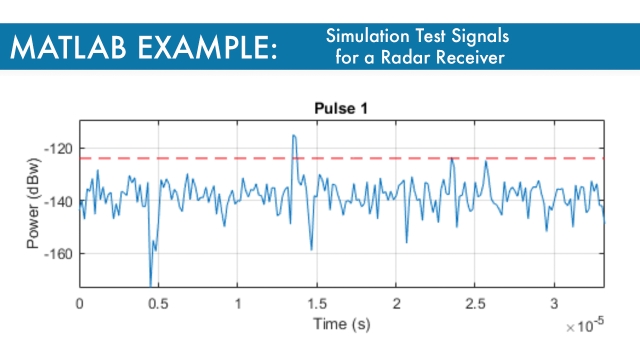
Simulating Test Signals for a Radar Receiver
Intermediate
Example
Application
This example shows how to simulate received signal of a monostatic pulse radar to estimate the target range. A monostatic radar has the transmitter collocated with the receiver. The...
See More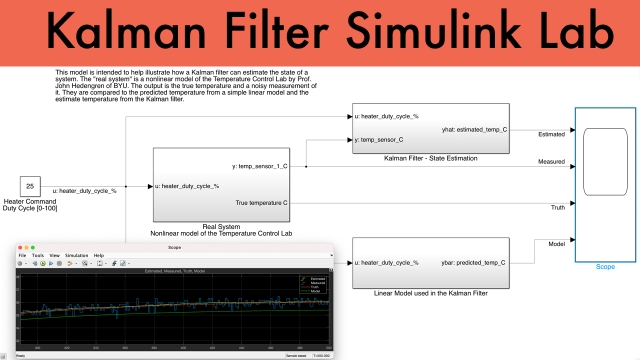
Kalman Filter Simulink 2022A example
Intermediate
Virtual Lab
Demonstration
This model is intended to help illustrate how a Kalman filter can estimate the state of a system. The "real system" is a nonlinear model of the Temperature Control Lab by Prof. John...
See More
TCLab PID Control
60 min
Intermediate
Article / Blog
Application
Implement a PID controller on the Temperature Control Lab hardware to drive the temperature from room temperature to 60 degrees C. This resource lets you attempt the design yourself first...
See More
Advances in feedforward control for measurable disturbances (in Spanish)
60 min
Intermediate
Video
Theory
The efficient compensation of load disturbances is one of the most important tasks in any control system. Most industrial processes are affected by disturbances and only feedback is commonly...
See More")
Koopman Spectral Analysis (Control)
15 min
Intermediate
Video
Theory
In this video, we explore extensions of Koopman theory for control systems. Much of the excitement and promise of Koopman operator theory is centered around the ability to represent...
See More
Perspectives on Control-Relevant Identification Through the Use of Interacti...
Intermediate
Peer Reviewed Paper
Theory
This paper presents a control-relevant identification methodology through an intuitive interactive tool called "Interactive Tool for Control Relevant Identification (ITCRI)". ITCRI...
See More
Virtual Labs for control education
Intermediate
Virtual Lab
Theory
This resource provides different links to virtual and remote labs that can be used for control education. Virtual and remote labs are very powerful tools for learning and teaching, that...
See More
Data-Driven Dynamical Systems Overview
21 min
Intermediate
Video
Theory
This video provides a high-level overview of this new series on data-driven dynamical systems. In particular, we explore the various challenges in modern dynamical systems, along with...
See More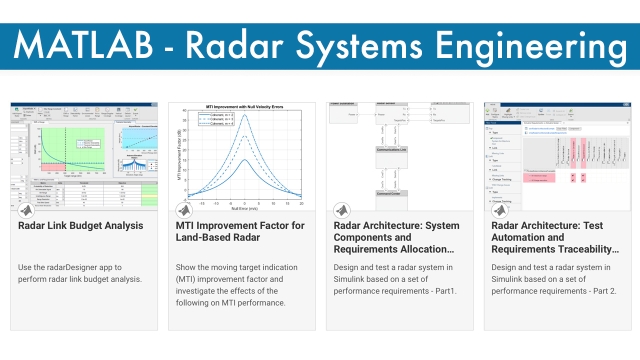
Radar Systems Engineering MATLAB Documentation and Examples
Intermediate
Example
Theory
The functions in this section give you the MATLAB tools needed to evaluate the performance of a radar system. You can use the radar equation to evaluate the radar received signal-to-noise...
See More
MPCTools: Nonlinear Model Predictive Control Tools for CasADi (Python Interf...
Intermediate
Software
Application
This Python package is a collection of model predictive control tools that build on CasADi by providing a simpler interface. Along with the python package, there are a bunch of example files...
See More
Various games for learning Controller Design
Intermediate
App
Theory
Since 2005, we are using educational games in the course „Einführung in die Regelungstechnik“ (Introduction to automatic control).
The project started with the game spaceballRT, which uses...
See More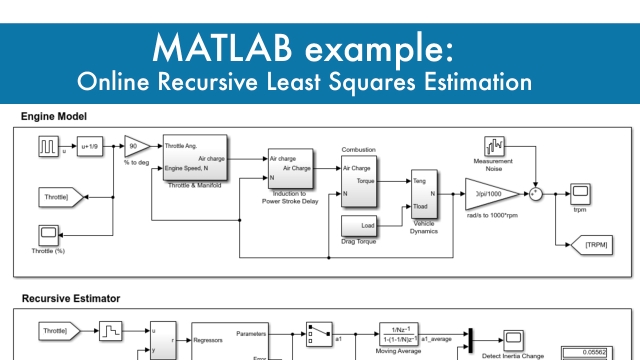
MATLAB Example: Online Recursive Least Squares Estimation
Intermediate
Project
Demonstration
This example shows how to implement an online recursive least squares estimator. You estimate a nonlinear model of an internal combustion engine and use recursive least squares to detect...
See More