

What are Phased Arrays?
17 min
Beginner
Video
Theory
This video introduces the concept of phased arrays. An array refers to multiple sensors, arranged in some configuration, that act together to produce a desired sensor pattern. With a phased...
See More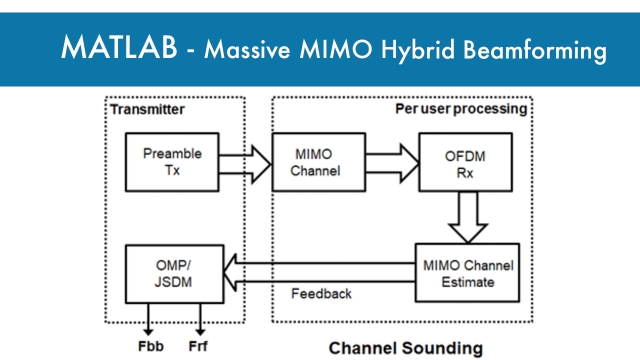
Massive MIMO Hybrid Beamforming
Beginner
Example
Application
This MATLAB example shows how hybrid beamforming is employed at the transmit end of a massive MIMO communications system, using techniques for both multi-user and single-user systems. The...
See More
PID Explained
20 min
Beginner
Article / Blog
Theory
A qualitative explanation of P, I, & D actions using graphs.
See More
Autonomous Navigation, Part 5: What Is Extended Object Tracking?
17 min
Beginner
Video
Theory
In many practical scenarios, there are other objects that may need to be observed and tracked in order to effectively navigate within an environment. This video will show extended object...
See More
Control Bootcamp: Observability Example in Matlab
8 min
Beginner
Video
Application
This video explores observability in Matlab on the example system of an inverted pendulum on a cart.
See More
Introduction to Classic Control Theory (Japanese)
Beginner
Video
Theory
A collection of video lectures by Yuki Nishimura covering an introduction to classic control theory.
See More![The Kalman Filter [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_382.jpg?itok=BhYaUiZA "The Kalman Filter [Control Bootcamp]")
The Kalman Filter [Control Bootcamp]
6 min
Beginner
Video
Theory
Here, we discuss the Kalman Filter, which is an optimal full-state estimator, given Gaussian white noise disturbances and measurement noise.
See More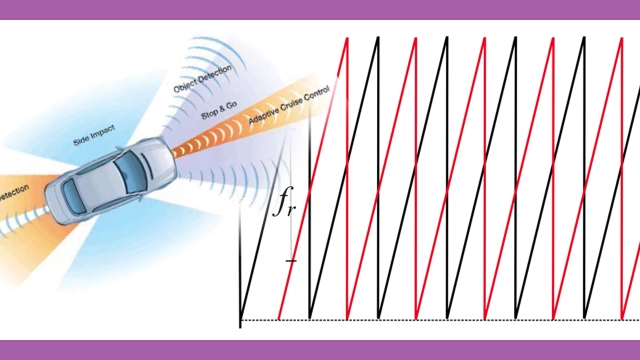
Fast chirp FMCW Radar in automotive applications
Advanced
Peer Reviewed Paper
Theory
FMCW (frequency-modulated continuous wave radar) modulations have been popularly implemented in the automotive radar applications. This document demonstrates system requirement for a new...
See More
My Sole Advise to Data Scientists on Coursera & Quora
Beginner
Article / Blog
Theory
This blog post by Tarry Singh answers questions including "How do I get started in the field on Machine Learning, Deep Learning or Artificial Intelligence" and "How do I advance from the...
See More
Understanding Sensor Fusion and Tracking, Part 6: What Is Track-Level Fusion...
15 min
Beginner
Video
Theory
Gain insights into track-level fusion, the types of tracking situations that require it, and some of the challenges associated with it.
You’ll see two different tracking architectures—track...
See More
Online and Recursive System Identification | System Identification, Part 4
19 min
Beginner
Video
Theory
Online system identification algorithms estimate the parameters and states of a model as new data is measured and available in real-time or near real-time. Brian Douglas covers what online...
See More
Intro to Data Science: Answering Questions with Data
6 min
Beginner
Video
Theory
This lecture describes the central aspect of data science: asking and answering questions with data. In particular, we discuss the thought process and progression of questions one might ask...
See More
Machine Learning Control: Overview
10 min
Beginner
Video
Theory
This lecture provides an overview of how to use machine learning optimization directly to design control laws, without the need for a model of the dynamics.
See More
ENG 1718 - MODELAGEM DE SISTEMAS DINÂMICOS (Portuguese)
500 min
Beginner
Video
Theory
Vídeos do curso Modelagem de Sistemas Dinâmicos. Mais informações na página do curso: https://helonayala.github.io/teaching/2018-msd/
See More
Reinforcement Learning for Engineers, Part 5: Overcoming the Practical Chall...
16 min
Beginner
Video
Theory
This video addresses a few challenges that occur when using reinforcement learning for production systems and provides some ways to mitigate them. Even if there aren’t straightforward ways...
See More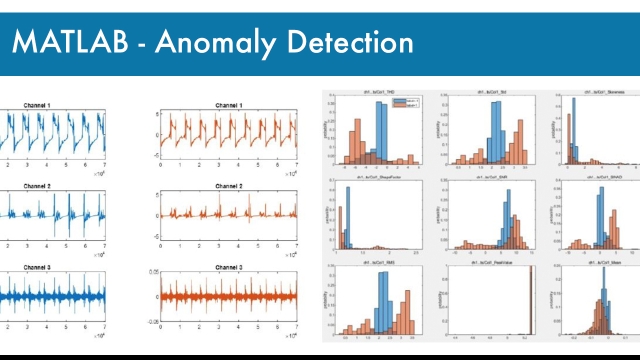
MATLAB Discovery Page - Anomaly Detection
Beginner
Article / Blog
Theory
Anomaly detection is the process of identifying events or patterns that differ from expected behavior. Anomaly detection can range from simple outlier detection to complex machine learning...
See More
1D Kinematics - Speed, Velocity, Acceleration
51 min
Beginner
Video
Theory
Walter Lewin is one of the most reputed professors and was a former lecturer at MIT. His free to watch series on YouTube titled 8.01 is an excellent one for undergrads and high school...
See More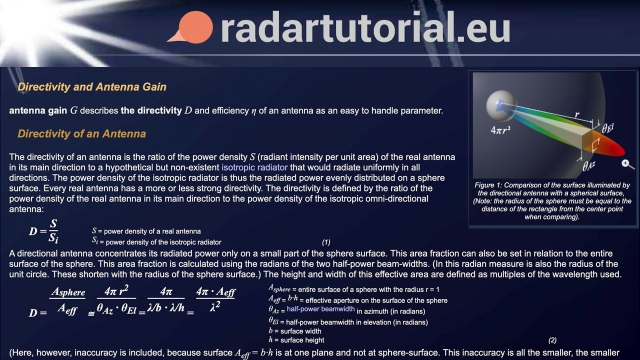
Directivity and Antenna Gain - radartutorial.eu
Beginner
Article / Blog
Theory
This page describes antenna directivity and gain. The directivity of an antenna is the ratio of the power density S (radiant intensity per unit area) of the real antenna in its main...
See More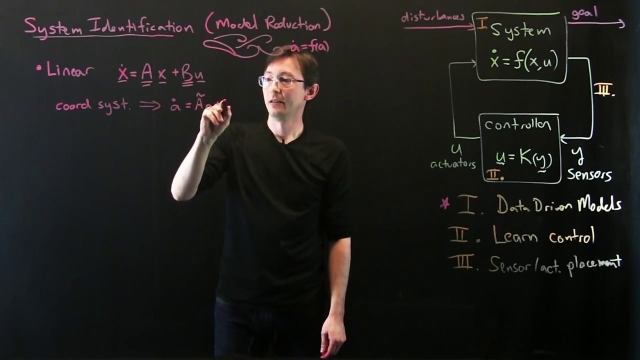
Data-Driven Control: Linear System Identification
20 min
Beginner
Video
Theory
Overview lecture on linear system identification and model reduction. This lecture discusses how we obtain reduced-order models from data that optimally capture input--output dynamics.
See More
Machine Learning: What is easy, medium, and hard?
38 min
Beginner
Video
Theory
This video gives a brief overview of what is easy, medium, and hard in machine learning, explored through case studies. Progress in machine learning is rapidly advancing, and changing the...
See More
MATLAB Online
Beginner
App
Application
Use MATLAB and Simulink through your web browser. No downloads or installations. MATLAB® Online™ provides access to MATLAB and Simulink from any standard web browser wherever you have...
See More
DSP Related
Beginner
Article / Blog
Application
Website with a lot of good content for any DSP scientists, researchers, and developers.
See More
What Is a Control System and Why Should I Care?
25 min
Beginner
Video
Demonstration
This is a 25 minute abbreviated version of the Part 1 & Part 2 talk. It goes through the basic ideas while skipping some of the details and examples of the longer talks. The talk abstract...
See More")
Robotic Car - How to read Gyro Datasheets (Part 2)
14 min
Beginner
Video
Theory
Have you ever been lost trying to understand the information in a gyro datasheet? This video should help! In this second part I explain the purpose of a buffer for a MEMS gyro and explain...
See More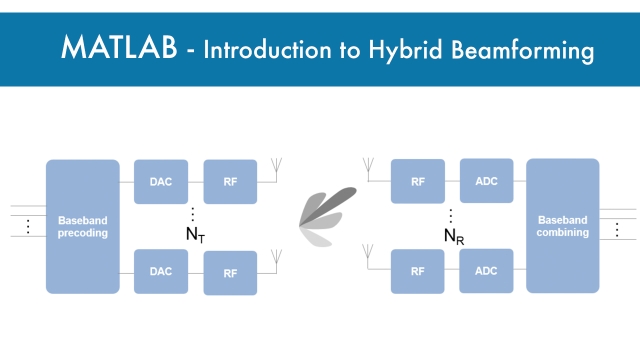
Introduction to Hybrid Beamforming
Beginner
Example
Application
This MATLAB example introduces the basic concept of hybrid beamforming and shows how to simulate such a system.
See More