

Radar Systems Engineering Lecture 4: The Radar Equation
Beginner
Presentation
Theory
This Free Radar Systems Engineering Course (video, audio and screen captured ppt slides) and separate pdf slides) has been developed as a first course in Radar Systems for first year...
See More
Control Bootcamp: Introduction to Robust Control
8 min
Beginner
Video
Theory
This video motivates robust control with the famous 1978 paper by John Doyle, titled "Guaranteed Margins for LQG Regulators"... Abstract: There are none.
See More
Robust Control, Part 4: Working with Parameter Uncertainty
13 min
Beginner
Video
Theory
The previous two videos showed a few different ways to quantify how robust a system is to model and plant uncertainty by looking at how much input and output variation it can handle before...
See More
Reinforcement Learning: An Introduction
Beginner
Book
Theory
From the book introduction:
The idea that we learn by interacting with our environment is probably the first to occur to us when we think about the nature of learning. When an infant plays...
See More
Sprint - Test Flight 8 and Data Review
17 min
Beginner
Video
Application
This video is part of a series that details the design, build, and test of Sprint - a thrust vector controlled model rocket by Joe Barnard of BPS Space.
See More
Virtual Lab for a Two-tanks system
Beginner
Virtual Lab
Application
This is a virtual lab for a two-tank system that can be used for modelling and control learing/teaching purposes. Open-loop tests and closed-loop simulatons based on PI control or PI plus...
See More
A simple MEMS gyro model using MATLAB / Simulink
16 min
Beginner
Video
Theory
This video walks through how to model a simple MEMS gyroscope using MATLAB/Simulink. At the end I show you how to linearize this model to use in your linear control loop design and analysis.
See More
Simulink Onramp
120 min
Beginner
Tutorial
Demonstration
Learn the basics of how to create, edit, and simulate models in Simulink®. Use block diagrams to represent real-world systems and simulate components and algorithms.
See More
edX course: Dynamics and Control
Beginner
Course
Theory
This is an interactive course about the basic concepts of Systems, Control and their impact in all the human activities. First, the basic concepts of systems, dynamics, structure and control...
See More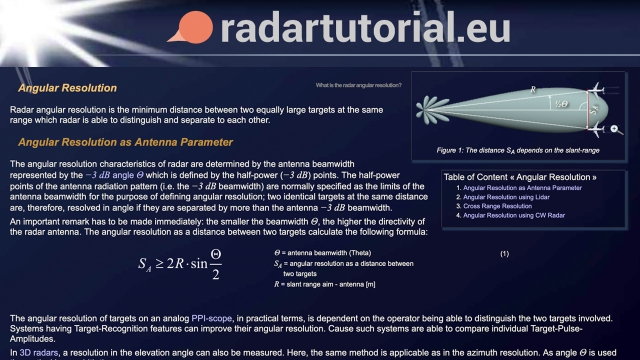
Radar Angular Resolution
Beginner
Article / Blog
Theory
This radartutorial.eu page describes angular resolution. Radar angular resolution is the minimum distance between two equally large targets at the same range which radar is able to...
See More
Peter Ponders PID - Introduction
3 min
Beginner
Video
Theory
The purpose of this video is to inform the viewer about what to expect. My videos go much deeper than the typical videos. They are geared for graduate st...
See More
Converting Constrained Optimization to Unconstrained Optimization Using the ...
54 min
Beginner
Video
Theory
In this video we show how to convert a constrained optimization problem into an approximately equivalent unconstrained optimization problem using the penalty...
See More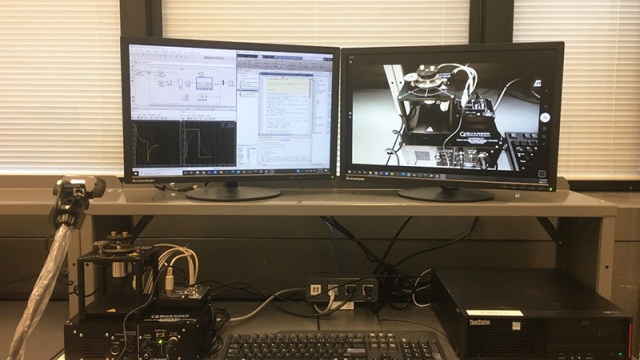
A Hybrid Lab Experience: Blending Hands-on Explorations with the Flexibility...
30 min
Beginner
Article / Blog
Demonstration
This case study examines how the Earth and Space Science and Engineering (ESSE) department at York University in Toronto offered a meaningful remote laboratory experience to over 180...
See More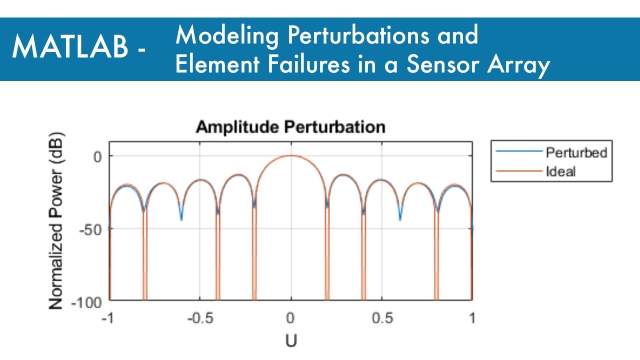
Modeling Perturbations and Element Failures in a Sensor Array
Beginner
Example
Demonstration
This MATLAB example shows how to model amplitude, phase, position and pattern perturbations as well as element failures in a sensor array.
See More
Systems Engineering, Part 2: Towards a Model-Based Approach
13 min
Beginner
Video
Theory
The role of systems engineering is to help find and maintain a balance between the stakeholder needs, the management needs, and the engineering needs of a project. So we can think of it as...
See More
Why Padé Approximations Are Great! | Control Systems in Practice
Beginner
Video
Theory
Watch an introduction to Padé approximations. Learn what Padé approximations are and how to calculate them, why they are important, and when to use them—specifically in the context of time...
See More
Pathfinding with A*
60 min
Beginner
Article / Blog
Application
An interactive visual explanation of the A* pathfinding algorithm. This resource uses motivating examples from computer games.
See More
Computer Aids for Chemical Engineering
Beginner
Article / Blog
Theory
A curated list of resources for Chemical Engineering students. The resources include syllabi, schedules, course notes, textbooks, screencasts, software, hardware, and other useful links.
See More
Intro to Data Science: Overview
6 min
Beginner
Video
Theory
This lecture provides an introductory overview to data science. I will discuss the high-level goals of this lecture series, and how data science is about asking and answering questions with...
See More
What Is a Control System and Why Should I Care? (Part 2)
34 min
Beginner
Video
Demonstration
This second video introduces some of the methods that engineers use to build control systems. It shows how we use science to help us derive models of systems from both measurements and...
See More
Nyquist Stability Criterion
15 min
Beginner
Article / Blog
Theory
The Wikipedia article on Nyquist Stability Criterion. This covers the Nyquist plot, the Cauchy argument principle, and the stability criterion itself. A mathematical derivation is also...
See More
Reinforcement Learning with MATLAB.
Beginner
Course
Application
This repository contains series of modules to get started with Reinforcement Learning with MATLAB.
It is divided into 4 stages.
In Stage 1, we start with learning RL concepts by manually...
See More
A* Pathfinding (E01: algorithm explanation)
12 min
Beginner
Video
Theory
Welcome to the first part in a series teaching pathfinding for video games. In this episode we take a look at the A* algorithm and how it works.
See More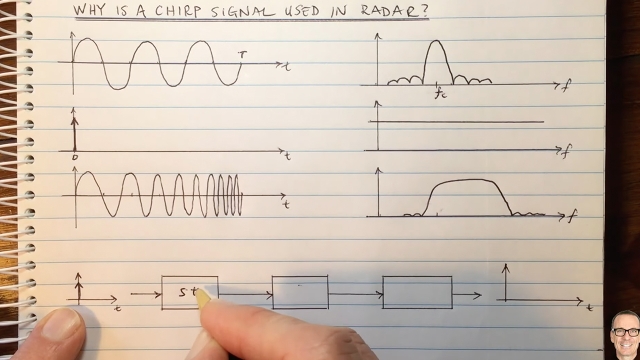
Why is a Chirp Signal used in Radar?
7 min
Beginner
Video
Theory
Gives an intuitive explanation of why the Chirp signal is a good compromise between an impulse waveform and a sinusoidal pulse waveform for radar.
See More
Neural Network Overview
7 min
Beginner
Video
Theory
This lecture gives an overview of neural networks, which play an important role in machine learning today.
See More