


Discrete control #4: Discretize with the matched method
14 min
Beginner
Video
Theory
This is the fourth video on discrete control and in this video we are going to continue exploring the different techniques we can use to discretize a continuous system and talk about the...
See More
Artificial Intelligence
6 min
Beginner
Video
Theory
This lecture discusses artificial intelligence (AI) in the context of data science and machine learning.
See More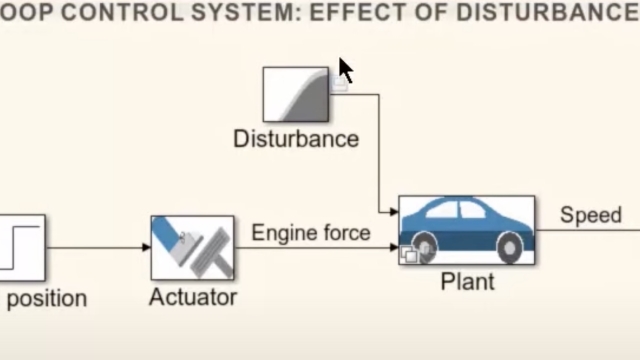
Understanding Control Systems: The Disturbance Rejection Problem
6 min
Beginner
Video
Demonstration
This video provides a demonstration using a car to show how you can simulate open- and closed-loop systems in Simulink®.
First, you will learn how to model and tune open-loop systems. The...
See More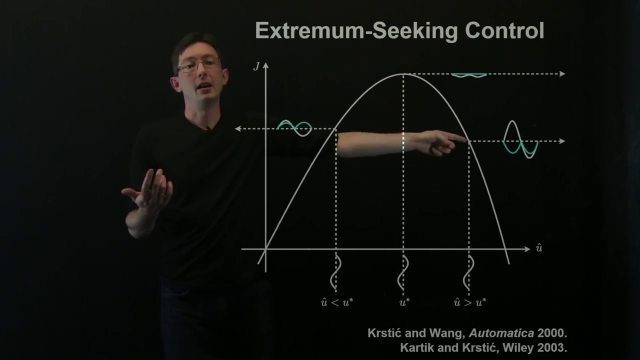
Extremum Seeking Control in Matlab
17 min
Beginner
Video
Application
This lecture explores extremum-seeking control (ESC) on a simple example in Matlab. In particular, a discrete-time (digital) version of ESC is coded in a Matlab script.
See More
Control Bootcamp: Kalman Filter Example in Matlab
22 min
Beginner
Video
Application
This lecture explores the Kalman Filter in Matlab on an inverted pendulum on a cart.
See More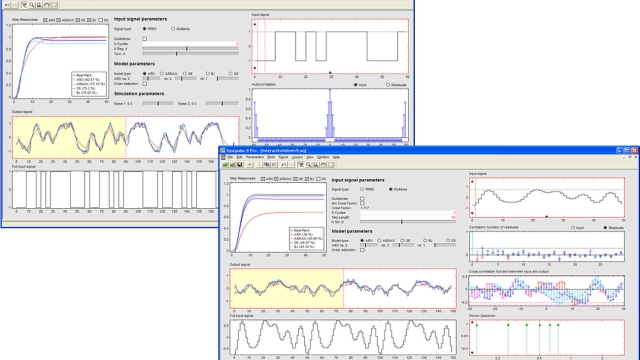
ITSIE: An Interactive Software Tool for System Identification Education
Beginner
App
Application
ITSIE is an Interactive Tool for System Identification Education. The tool is developed using Sysquake, a Matlab-like language with fast execution and excellent facilities for interactive...
See More
Process Dynamics and Control Course
Beginner
Course
Theory
This course focuses on a complete start to finish process of physics-based modeling, data driven methods, and controller design. Although some knowledge of computer programming is required...
See More
Discrete control #3: Designing for the zero-order hold
13 min
Beginner
Video
Theory
This is the third video on discrete control and in this video, I want to clear up a confusion that I caused last time regarding using the ZOH method to discretize a continuous controller and...
See More
3-DOF Orientation Tracking with IMUs
30 min
Beginner
Article / Blog
Theory
This document is not meant to be a comprehensive review of orientation tracking for virtual reality applications but rather an intuitive introduction to inertial measurement units (IMUs) and...
See More
Why Choose Deep Learning? Deep Learning for Engineers, Part 1
15 min
Beginner
Video
Theory
This video introduces deep learning from the perspective of solving practical engineering problems. The goal is to provide an introduction to the range of practical engineering problems that...
See More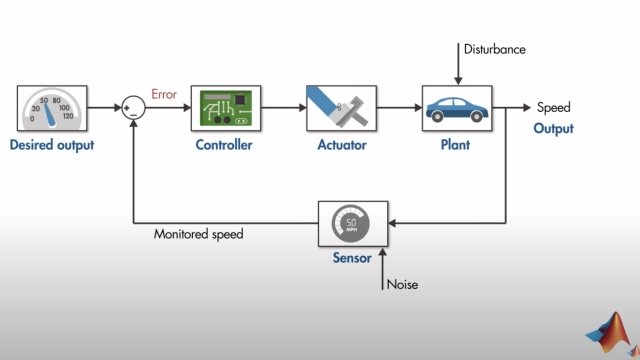
Understanding Control Systems: Components of a Feedback Control System
5 min
Beginner
Video
Demonstration
This video introduces the components of a feedback control system and how they interact with each other.
Learn basic terminology by walking through examples that include driving a car...
See More
Resonance in Nature and Bioinspired Squid Robots
18 min
Beginner
Video
Demonstration
Bioinspired robots combine the best of both biology and engineering. Using tools learned from nature, we can build squid-like and other squishy robots to improve current capabilities in...
See More
Understanding the Z-Transform
20 min
Beginner
Video
Theory
This intuitive introduction shows the mathematics behind the Z-transform and compares it to its similar cousin, the discrete-time Fourier transform. Mathematically, the Z-transform is...
See More
Discrete control #2: Discretize! Going from continuous to discrete domain
24 min
Beginner
Video
Theory
This is the second video in the discrete control series. It focuses on discretizing a continuous system - getting to the z-domain from the s-domain.
See More
Machine Learning & Text Processing Lectures
Beginner
Video
Theory
This is the video lecture collection by Victor Lavrenko.
See More
Systems Engineering, Part 1: What Is Systems Engineering?
15 min
Beginner
Video
Theory
This video covers what systems engineering is and why it’s useful. We will present a broad overview of how systems engineering helps us develop complex projects that meet the program...
See More
How Simulations Work
30 min
Beginner
Article / Blog
Theory
This article sets out the critical aspects of building good simulations — that is, simulations that are accurate, easy to develop and analyze, and fast. The first sections deal with how a...
See More
MATLAB toolbox for control 101 course
Beginner
Software
Theory
Community toolbox project led by Anthony Rossiter and sponsored by MathWorks. The project incorporates input from various international collaborators. The aim is to make the developed...
See More
Drone Simulation and Control, Part 1: Setting Up the Control Problem
14 min
Beginner
Video
Theory
Quadcopters and other styles of drones are extremely popular, partly because they have sophisticated programmed control systems that allow them to be stable and fly autonomously with very...
See More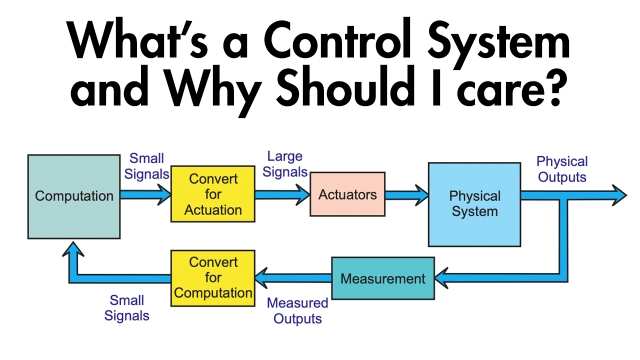
What's a Control System and Why Should I Care?
Beginner
Article / Blog
Theory
This paper is designed as a primer for college level STEM students about to take their first formal class in feedback control systems. This means that the explanations assume the reader has...
See More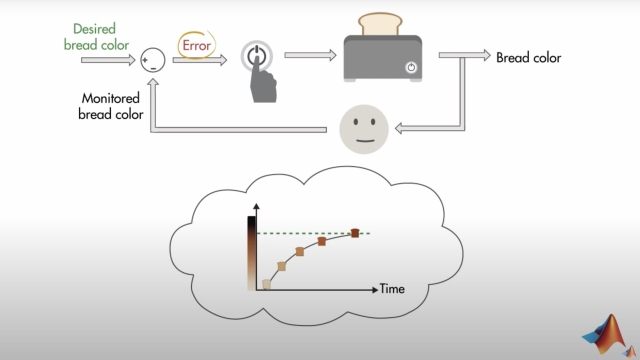
Understanding Control Systems: Feedback Control Systems
6 min
Beginner
Video
Theory
This video provides introductory examples to learn about the basics of feedback control (closed-loop control) systems.
Learn how feedback control is used to automate processes and discover...
See More
What Is Extremum Seeking Control? | Learning-Based Control
16 min
Beginner
Video
Theory
Get an introduction to extremum seeking control—an adaptive control method for finding an optimal control input or set of system parameters without needing a model of your system, static...
See More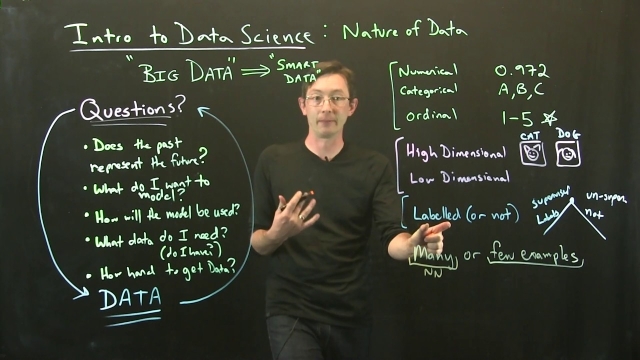
Intro to Data Science: The Nature of Data
12 min
Beginner
Video
Theory
This lecture discusses the types of data you might encounter, and how it determines which techniques to use.
See More
Control Systems in Practice, Part 8: The Gang of Six in Control Theory
18 min
Beginner
Video
Theory
When analyzing feedback systems, we can get caught up thinking solely about the relationship between the reference signal and the output. However, to fully understand how a feedback system...
See More
EGGN 510 - Lecture 02-1 Digital Image Fundamentals
9 min
Beginner
Video
Theory
This is a video lecture of EGGN 510 Image and Multidimensional Signal Processing by William Hoff.
See More