


What Is a Control System and Why Should I Care? (Part 2)
34 min
Beginner
Video
Demonstration
This second video introduces some of the methods that engineers use to build control systems. It shows how we use science to help us derive models of systems from both measurements and...
See More
What are Phased Arrays?
17 min
Beginner
Video
Theory
This video introduces the concept of phased arrays. An array refers to multiple sensors, arranged in some configuration, that act together to produce a desired sensor pattern. With a phased...
See More![Principal Component Analysis (PCA) 2 [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_494.jpg?itok=Q2x6S-Uj "Principal Component Analysis (PCA) 2 [Python]")
Principal Component Analysis (PCA) 2 [Python]
7 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used for principal component analysis (PCA) in Python (part 2).
See More
Intro to Data Science: Answering Questions with Data
6 min
Beginner
Video
Theory
This lecture describes the central aspect of data science: asking and answering questions with data. In particular, we discuss the thought process and progression of questions one might ask...
See More
Autonomous Navigation, Part 3: Understanding SLAM Using Pose Graph Optimizat...
16 min
Beginner
Video
Theory
This video provides some intuition around Pose Graph Optimization—a popular framework for solving the simultaneous localization and mapping (SLAM) problem in autonomous navigation.
We’ll...
See More
A* Pathfinding (E01: algorithm explanation)
12 min
Beginner
Video
Theory
Welcome to the first part in a series teaching pathfinding for video games. In this episode we take a look at the A* algorithm and how it works.
See More
Control Bootcamp: Overview
19 min
Beginner
Video
Theory
Overview lecture for bootcamp on optimal and modern control. In this lecture, we discuss the various types of control and the benefits of closed-loop feedback control.
See More
Neural Networks and Deep Learning
7 min
Beginner
Video
Theory
This lecture explores the recent explosion of interest in neural networks and deep learning in the context of 1) vast and increasing data sets, and 2) rapidly improving computational...
See More
Routh Array and Stability
7 min
Beginner
Video
Theory
I show how we can find the range of allowed controller gains for a system that will allow us to maintain stability using a Routh Array.
See More
Lecture 12: Steady state error
26 min
Beginner
Video
Theory

RL Course by David Silver - Lecture 4: Model-Free Prediction
97 min
Intermediate
Video
Theory
An introduction to Monte-Carlo Learning and Temporal Difference Learning
See More
Understanding PID Control, Part 2: Expanding Beyond a Simple Integral
10 min
Beginner
Video
Theory
The first video in this series described a PID controller, and it showed how each of the three branches help control your system.That seemed simple enough and appeared to work. However, in...
See More
Nonhomogeneous Linear Ordinary Differential Equations
70 min
Beginner
Video
Theory
In the previous video (https://youtu.be/3Kox-3APznI) we examined solving homogeneous linear ordinary differential equations (the forcing function was equal t...
See More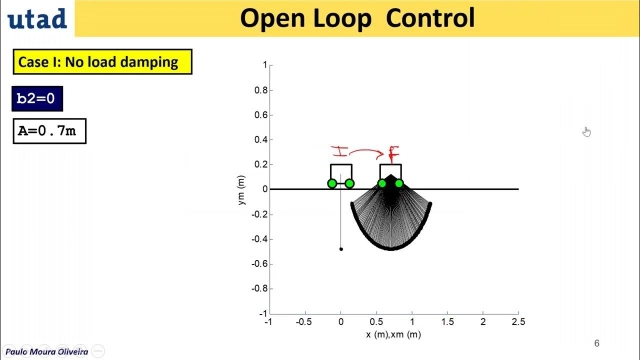
Posicast Control -3 - ( In English )
8 min
Beginner
Video
Theory
In this video a Gantry-Crane control simulation problem is introduced. The problem is presented and some introductory simulations are shown.
See More
Lecture 26: Stability examples, GM and PM using Nyquist Stability Criterion
56 min
Beginner
Video
Theory

Numerically Solving Partial Differential Equations
101 min
Beginner
Video
Theory
In this video we show how to numerically solve partial differential equations by numerically approximating partial derivatives using the finite difference me...
See More
Lecture 8: More on Transfer Functions
23 min
Beginner
Video
Theory
Expressing Vectors in Different Frames Using Rotation Matrices
45 min
Intermediate
Video
Theory
In this video we develop notation to express a vector in different reference/coordinate frames. We then investigate how to use rotation matrices to translate from a vector expressed in one...
See More
Routh-Hurwitz Criterion, Beyond Stability
11 min
Beginner
Video
Theory
This video explains of few uses of the Routh-Hurwitz Criterion that go beyond simply determining how many poles exist in the right half plane. I cover how to determine gain margin and how...
See More
Using ‘rlocus’ in Matlab to Plot the Root Locus
19 min
Beginner
Video
Application
This tutorial illustrates how to use the ‘rlocus’ command in Matlab to quickly and easily sketch the root locus.Discussion on the 3 example transfer function...
See More
CORRECTION: Bode Plots by Hand: Complex Poles or Zeros
10 min
Beginner
Video
Theory
I explain how to determine the straight-line estimate of the Bode Plot for a second order transfer function with a pair of complex poles. This video is a repeat of the last half of the Bode...
See More
Linear Systems of Equations, Least Squares Regression, Pseudoinverse
11 min
Beginner
Video
Theory
This video describes how the SVD can be used to solve linear systems of equations. In particular, it is possible to solve nonsquare systems (overdetermined or underdetermined) via least...
See More
Coriolis Effect Demonstration (with Drones)
13 min
Intermediate
Video
Theory
We demonstrate how rotating reference frames give rise to the Coriolis effect and centrifugal acceleration. In this video, we approach this as a simple physics demonstration and examine...
See More
Simulating the Logistic Map in Matlab
16 min
Intermediate
Video
Application
This video shows how simple it is to simulate discrete-time dynamical systems, such as the Logistic Map, in Matlab.
See More
Building the Flight Controller Hardware - dRehmFlight VTOL
11 min
Beginner
Video
Application
This video will show you how to setup and solder the default recommended hardware setup for the dRehmFlight VTOL flight controller package. This hardware configuration will work with the...
See More