

What Is Extremum Seeking Control? | Learning-Based Control
16 min
Beginner
Video
Theory
Get an introduction to extremum seeking control—an adaptive control method for finding an optimal control input or set of system parameters without needing a model of your system, static...
See More
Control Systems in Practice, Part 4: Why Time Delay Matters
15 min
Beginner
Video
Theory
Time delays exist in two varieties: signal distorting delays, like phase lag, in which each frequency is delayed by a different amount of time, resulting in a distorted signal shape; and non...
See More
Why Digital Beamforming Is Useful for Radar
13 min
Intermediate
Video
Theory
Learn how you can use digital beamformers to improve the performance and functions of radar systems. The MATLAB Tech Talk series on radar covered how to use radar to determine range, range...
See More
Linear Regression
10 min
Beginner
Video
Theory
Linear regression is a cornerstone of data-driven modeling; here we show how the SVD can be used for linear regression.
See More
Understanding Closed-Loop Control
9 min
Beginner
Video
Demonstration
This lecture discusses the differences between open loop and closed loop control in a very easy and intuitive way. Daily examples, like a dishwasher, plant irrigation, and car speed systems...
See More
Why Choose Deep Learning? Deep Learning for Engineers, Part 1
15 min
Beginner
Video
Theory
This video introduces deep learning from the perspective of solving practical engineering problems. The goal is to provide an introduction to the range of practical engineering problems that...
See More")
Koopman Spectral Analysis (Control)
15 min
Intermediate
Video
Theory
In this video, we explore extensions of Koopman theory for control systems. Much of the excitement and promise of Koopman operator theory is centered around the ability to represent...
See More
Trimming and Linearization, Part 1: What is Linearization?
14 min
Beginner
Video
Theory
Why go through the trouble of linearizing a model? To paraphrase Richard Feynman, it’s because we know how to solve linear systems. With a linear model we can more easily design a controller...
See More
What Is Fuzzy Logic | Fuzzy Logic Part 1
16 min
Beginner
Video
Theory
This video introduces fuzzy logic and explains how you can use it to design a fuzzy inference system (FIS), which is a powerful way to use human experience to design complex systems...
See More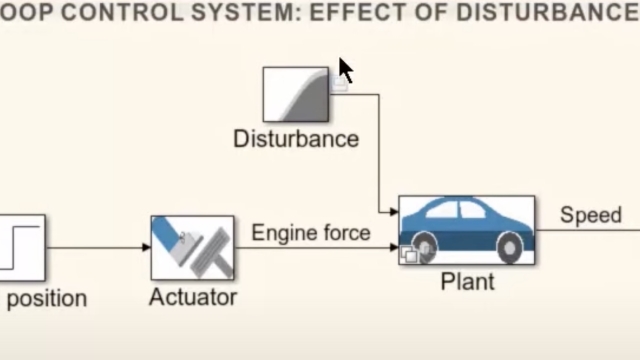
Understanding Control Systems: The Disturbance Rejection Problem
6 min
Beginner
Video
Demonstration
This video provides a demonstration using a car to show how you can simulate open- and closed-loop systems in Simulink®.
First, you will learn how to model and tune open-loop systems. The...
See More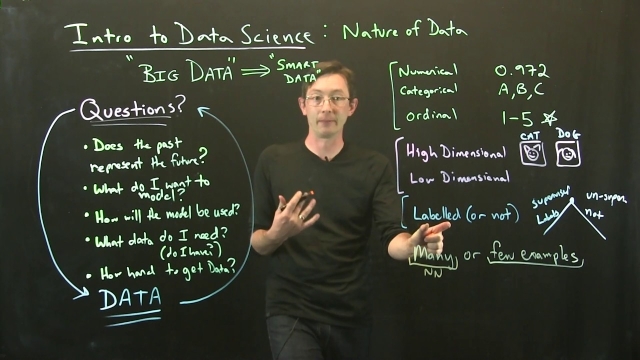
Intro to Data Science: The Nature of Data
12 min
Beginner
Video
Theory
This lecture discusses the types of data you might encounter, and how it determines which techniques to use.
See More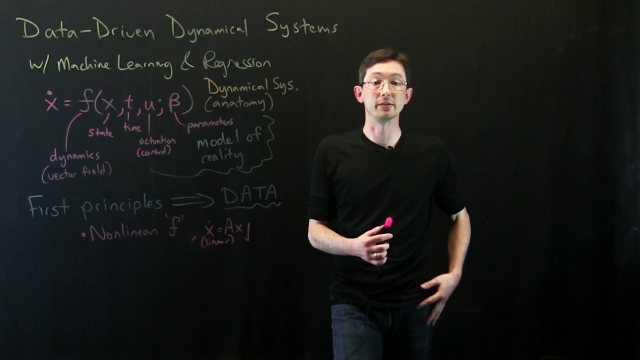
Data-Driven Dynamical Systems Overview
21 min
Intermediate
Video
Theory
This video provides a high-level overview of this new series on data-driven dynamical systems. In particular, we explore the various challenges in modern dynamical systems, along with...
See More
Control Bootcamp: Observability Example in Matlab
8 min
Beginner
Video
Application
This video explores observability in Matlab on the example system of an inverted pendulum on a cart.
See More
Kristin Pettersen Lectures on Nonlinear Control
300 min
Intermediate
Video
Theory
Kristin Pettersen Lectures on Nonlinear Control, including many of the necessary mathematical tools and concepts.
See More
Regulatory PID (Polish)
18 min
Beginner
Video
Theory
W tym odcinku, opisze wam podstawy działania regulatorów PID.
See More
Control Bootcamp: Introduction to Robust Control
8 min
Beginner
Video
Theory
This video motivates robust control with the famous 1978 paper by John Doyle, titled "Guaranteed Margins for LQG Regulators"... Abstract: There are none.
See More
Wind Tunnel Data Analysis and Testing Considerations
111 min
Intermediate
Video
Theory
This is the last video in our 3 part series on wind tunnel testing. In this video, we discuss what typical plots of wind tunnel data might look like and how to extract relevant information...
See More
What are Transfer Functions? | Control Systems in Practice
10 min
Beginner
Video
Theory
This video introduces transfer functions - a compact way of representing the relationship between the input into a system and its output. It covers why transfer functions are so popular and...
See More
System Identification: Regression Models
5 min
Intermediate
Video
Theory
This lecture provides an overview of modern data-driven regression methods for linear and nonlinear system identification, based on the dynamic mode decomposition (DMD), Koopman theory, and...
See More
Nonlinear System Identification | System Identification, Part 3
17 min
Beginner
Video
Theory
Learn about nonlinear system identification by walking through one of the many possible model options: A nonlinear ARX model. Brian Douglas covers the importance of adding an offset term to...
See More
Video Lectures on Automatic Control
Beginner
Video
Theory
A collection of 32 video lectures on automatic control by Dr. Rajesh Joseph Abraham.
See More
Model Reference Adaptive Control Part-1
60 min
Beginner
Video
Theory
Video course on nonlinear and adaptive control by Dr. Shubhendu Bhasin, Department of Electrical Engineering, IIT Delhi.
See More
Autonomous Navigation, Part 6: Metrics for System Assessment
15 min
Beginner
Video
Theory
Take a systems engineering approach to verifying the autonomous navigation system end to end and learn how simulations and physical tests can complement each other. The video also covers a...
See More
Nathan Kutz:"Data-driven Discovery of Governing Physical Laws"
73 min
Intermediate
Video
Theory
Seminar by Dr.Nathan Kutz on "Data-driven Discovery of Governing Physical Laws" on 10/31/2018 CICS Seminar Series
See More
Intro to Data Science: Overview
6 min
Beginner
Video
Theory
This lecture provides an introductory overview to data science. I will discuss the high-level goals of this lecture series, and how data science is about asking and answering questions with...
See More