


Lecture 8: More on Transfer Functions
23 min
Beginner
Video
Theory

Time domain - tutorial 7: system properties
22 min
Beginner
Video
Theory
In this video, we cover system properties. The concept of memoryless, causal, stable, invertible, time-invariant and linear systems is intuitively explained...
See More
CORRECTION: Bode Plots by Hand: Complex Poles or Zeros
10 min
Beginner
Video
Theory
I explain how to determine the straight-line estimate of the Bode Plot for a second order transfer function with a pair of complex poles. This video is a repeat of the last half of the Bode...
See More
Particle Filter Explained without Equations
7 min
Beginner
Video
Theory
This video provides a quick graphical introduction to the particle filter. It does a good job building some intuition behind the filter without ever touching on any mathematics. It's worth a...
See More
Linear Systems of Equations, Least Squares Regression, Pseudoinverse
11 min
Beginner
Video
Theory
This video describes how the SVD can be used to solve linear systems of equations. In particular, it is possible to solve nonsquare systems (overdetermined or underdetermined) via least...
See More
Time domain - tutorial 10: interconnection of LTI systems
7 min
Beginner
Video
Theory
In this video, we learn how to connect LTI systems to make a bigger system. The learning objectives are to:1) get familiar with parallel and series intercon...
See More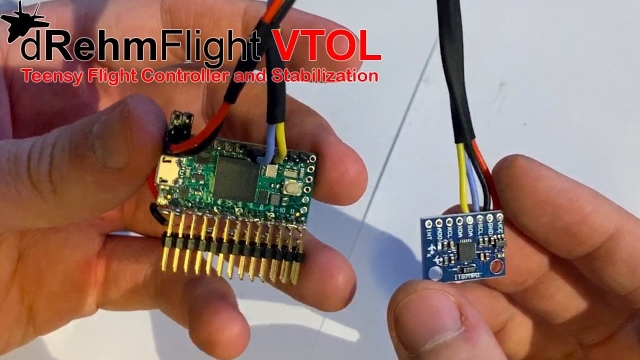
Building the Flight Controller Hardware - dRehmFlight VTOL
11 min
Beginner
Video
Application
This video will show you how to setup and solder the default recommended hardware setup for the dRehmFlight VTOL flight controller package. This hardware configuration will work with the...
See More
Machine Learning and Cross-Validation
7 min
Beginner
Video
Theory
This lecture discusses the importance of cross-validation to assess models obtained via machine learning.
See More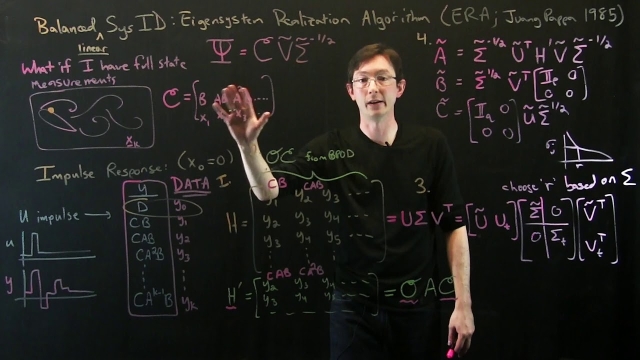
Data-Driven Control: Balanced Models with ERA
6 min
Intermediate
Video
Theory
In this lecture, we connect the eigensystem realization algorithm (ERA) to balanced proper orthogonal decomposition (BPOD). In particular, if enough data is collected, then ERA produces...
See More
Second Order Dynamics in Process Control
17 min
Beginner
Video
Theory
How do we simulate two first order transfer functions in series, a inherently second order system, or two coupled differential equations? Tune in to find out!
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 3 - Model-Fr...
73 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

Understanding Model Predictive Control, Part 2: What is MPC?
6 min
Beginner
Video
Theory
Learn how model predictive control (MPC) works. Using a simple car example, this video provides insight into an MPC controller’s strategy for finding the optimal steering wheel angle to...
See More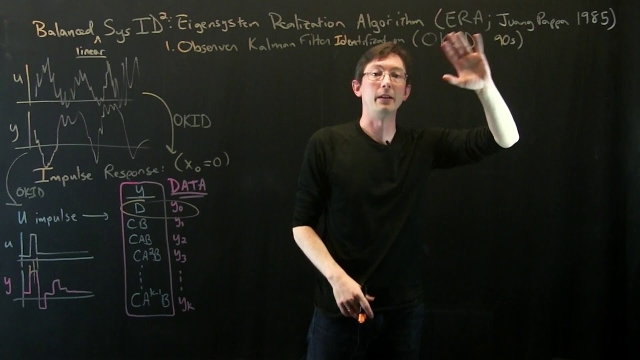
Data-Driven Control: Observer Kalman Filter Identification
12 min
Intermediate
Video
Theory
In this lecture, we introduce the observer Kalman filter identification (OKID) algorithm. OKID takes natural input--output data from a system and estimates the impulse response, for later...
See More
Visually Determining Transfer Functions
6 min
Beginner
Video
Theory
Process Control classes can get pretty hard to follow when you lose sight of what transfer functions really are. How do you get them in the first place?
See More
RL Course by David Silver - Lecture 4: Model-Free Prediction
97 min
Intermediate
Video
Theory
An introduction to Monte-Carlo Learning and Temporal Difference Learning
See More
Drone Simulation and Control, Part 5: Tuning the PID controller
14 min
Beginner
Video
Theory
In the last video, we learned how accurate, nonlinear models are great for simulation but they don’t lend themselves well to linear analysis and design. This video takes the nonlinear model...
See More
Deploying Deep Learning Models | Deep Learning for Engineers, Part 5
15 min
Beginner
Video
Theory
This video covers the additional work and considerations you need to think about once you have a deep neural network that can classify your data. We need to consider that the trained network...
See More
Peter Ponders PID - Cascade Control Part2
14 min
Beginner
Video
Theory
The inner loop pole locations and gains are calculated first so the inner loop pole locations are determined by the user. The outer loop poles are still pla...
See More")
Principal Component Analysis (PCA)
13 min
Beginner
Video
Theory
Principal component analysis (PCA) is a workhorse algorithm in statistics, where dominant correlation patterns are extracted from high-dimensional data.
See More
Computing the DFT Matrix
7 min
Beginner
Video
Theory
This video discusses how to compute the Discrete Fourier Transform (DFT) matrix in Matlab and Python. In practice, the DFT should usually be computed using the fast Fourier transform (FFT)...
See More")
Building a Matlab/Simulink Model of an Aircraft: the Research Civil Aircraft...
51 min
Beginner
Video
Application
In this video we implement the RCAM model as a Matlab script that is called from a Simulink model. The result is a fully encapsulated Simulink model of a no...
See More
Expressing Vectors in Different Frames Using Rotation Matrices
45 min
Intermediate
Video
Theory
In this video we develop notation to express a vector in different reference/coordinate frames. We then investigate how to use rotation matrices to translate from a vector expressed in one...
See More with Smith Predictor")
SOPDT Sliding Mode Control ( SMC ) with Smith Predictor
6 min
Beginner
Video
Theory

The Fast Fourier Transform Algorithm
10 min
Beginner
Video
Theory
Here I discuss the Fast Fourier Transform (FFT) algorithm, one of the most important algorithms of all time.
See More
Introduction to Full State Feedback Control
62 min
Beginner
Video
Theory
In this video we introduce the concept of a full state feedback controller. We discuss how to use this system to place the eigenvalues of the closed loop sys...
See More