

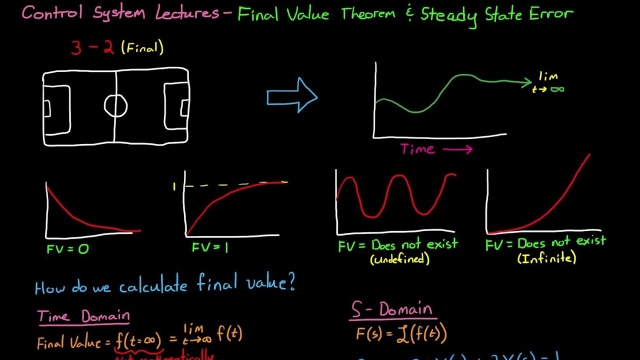
Final Value Theorem and Steady State Error
12 min
Beginner
Video
Theory
This Final Value Theorem is a way we can determine what value the time domain function approaches at infinity but from the S-domain transfer function. This is very helpful when we're trying...
See More
The Navigation Equations: Computing Position North, East, and Down
52 min
Intermediate
Video
Theory
In this video we show how to compute the inertial velocity of a rigid body in the vehicle-carried North, East, Down (NED) frame. This is achieved by rotating the velocity expressed in the...
See More
Peter Ponders PID - System Identification Advanced
19 min
Beginner
Video
Theory

Designing a PID Controller Using the Root Locus Method
63 min
Beginner
Video
Theory
In this video we discuss how to use the root locus method to design a PID controller. In addition to discussing the theory, we look at Matlab tools to enabl...
See More")
The Discrete Fourier Transform (DFT)
17 min
Beginner
Video
Application
This video introduces the Discrete Fourier Transform (DFT), which is how to numerically compute the Fourier Transform on a computer. The DFT, along with its fast FFT implementation, is one...
See More
Derivation of Rodrigues’ Rotation Formula
43 min
Intermediate
Video
Theory
In this video we explain and derive Rodrigues’ Rotation Formula. This functions describes how to rotate an arbitrary vector about another arbitrary axis of rotation. This has applications to...
See More
Understanding Sensor Fusion and Tracking, Part 5: How to Track Multiple Obje...
15 min
Beginner
Video
Theory
This video describes two common problems that arise when tracking multiple objects: data association and track maintenance. We cover a few ways to solve these issues and provide a general...
See More![Randomized SVD Code [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_402.jpg?itok=pmR7mX3g)
Randomized SVD Code [Python]
10 min
Beginner
Video
Application
This video describes the randomized singular value decomposition (rSVD) (Python code).
See More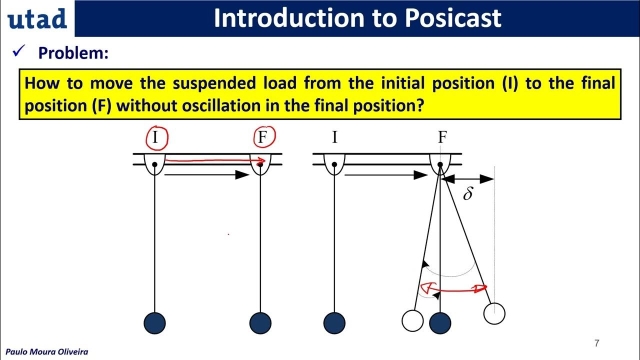
Posicast Control - 1 ( In English)
11 min
Beginner
Video
Theory
This video is an introduction to a learning journey about Posicast Control structured as follows: - Preface - Motivation - Introduction to Posicast Control - Half-Cycle Posicast
See More
Lecture 3: Electrical and Mechanical System Transfer Functions
52 min
Beginner
Video
Theory

Relationship Between Poles and Performance of a Dynamic System
43 min
Beginner
Video
Theory
In this video we establish the relationship between pole locations and associated performance of a dynamic system. This relationship is useful to translate ...
See More![SVD: Eigenfaces 4 [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_418.jpg?itok=dWTN1neh)
SVD: Eigenfaces 4 [Matlab]
6 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used to efficiently represent human faces, in the so-called "eigenfaces" (Matlab code, part 4).
See More
Lecture 7: More on Signal Flow Graphs and Block Diagram Reduction
44 min
Beginner
Video
Theory
")
Laplace domain – tutorial 2: Region of Convergence (ROC)
8 min
Beginner
Video
Theory
In this video, we learn five golden rules on how to quickly find the Region of Convergence (ROC) of Laplace transform. Learn Signal Processing 101 in 31 lect...
See More
Robust Principal Component Analysis (RPCA)
22 min
Intermediate
Video
Theory
Robust statistics is essential for handling data with corruption or missing entries. This robust variant of principal component analysis (PCA) is now a workhorse algorithm in several fields...
See More
Control Bootcamp: Example Frequency Response (Bode Plot) for Spring-Mass-Da...
18 min
Beginner
Video
Theory
This video shows how to compute and interpret the Bode plot for a simple spring-mass-damper system.
See More
Bode Stability Criterion in Frequency Response Analysis Intro
12 min
Beginner
Video
Theory
The Bode stability criterion allows us to quickly determine the stability and relative stability of a transfer function. It uses a graphical method that can ...
See More
Why Learn Control Theory
5 min
Beginner
Video
Theory
In this video I present a few reasons why learning control theory is important and try to give some motivation to continue learning.
See More
Time domain - tutorial 2: signal representation
2 min
Beginner
Video
Theory
In this video, we review how to represent information as a signal. The information can be anything such as voice (1D) or an image (2D) or even a video (3D). ...
See More
Machine Learning Goals
7 min
Beginner
Video
Theory
This lecture discusses the high-level goals of machine learning, and what we want out of our models. Goals include speed and accuracy, along with interpretability, generalizability...
See More
Feedforward Control Intro
7 min
Beginner
Video
Theory
If we know how a disturbance will affect an output, we can proactively change our manipulated variable to counteract it.
See More
Data-Driven Control: Balanced Truncation and BPOD Example
11 min
Intermediate
Video
Application
In this lecture, we explore balanced truncation and BPOD on a numerical example in Matlab.
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 12 - Fast Rei...
81 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

Direct Synthesis for PID Design Intro
11 min
Beginner
Video
Theory
Direct Synthesis for PID Design Intro
See More
Peter Ponders PID - Integrated Time Absolute Error - 4 Pole example
17 min
Beginner
Video
Theory
This video shows how to calculate the coefficients for a 4 pole ITAE and how to use the 4 pole ITAE to calculate closed loop controller gains.
See More