

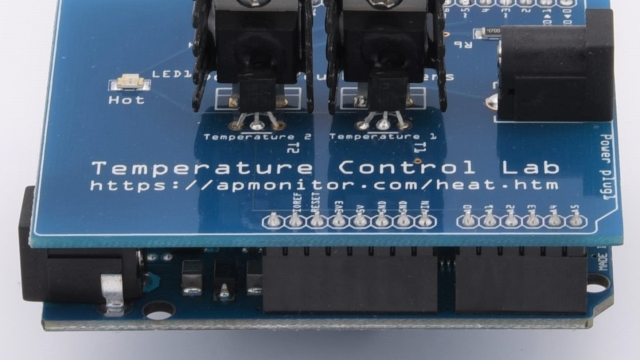
Temperature Control Lab (TCL)
Beginner
Hardware
Application
The temperature control lab is an application of feedback control with an Arduino, an LED, two heaters, and two temperature sensors. The heater power output is adjusted to maintain a desired...
See More
System Identification: Theory for the User
Beginner
Book
Theory
From the Back Cover
The field's leading text, now completely updated.
Modeling dynamical systems ― theory, methodology, and applications.
Lennart Ljung's System Identification: Theory...
See More
What Are Dynamic Models? Chapter 1 from Dynamic Models in Biology
Beginner
Book
Theory
Throughout this book we use a wide-ranging set of case studies to illustrate different aspects of models and modeling. In this introductory chapter we describe and give examples of different...
See More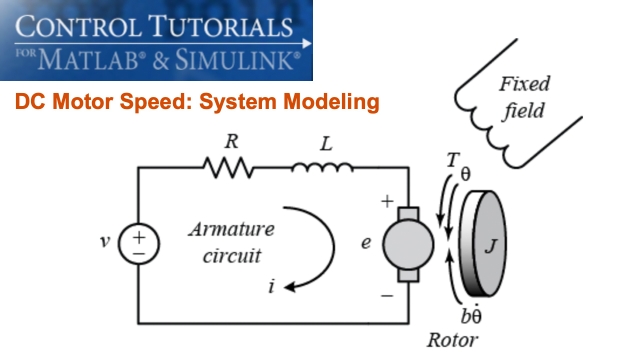
DC Motor Speed: System Modeling
Beginner
Project
Theory
This examples walks through modeling a simple DC motor in MATLAB.
See More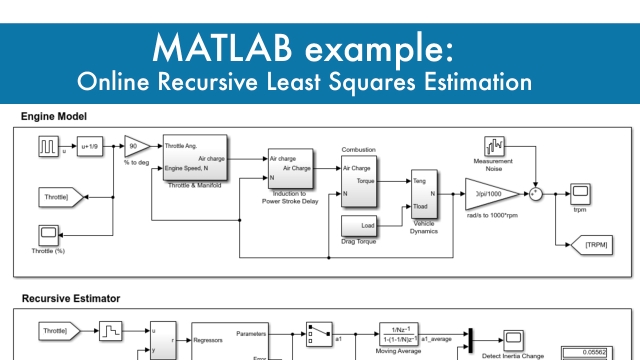
MATLAB Example: Online Recursive Least Squares Estimation
Intermediate
Project
Demonstration
This example shows how to implement an online recursive least squares estimator. You estimate a nonlinear model of an internal combustion engine and use recursive least squares to detect...
See More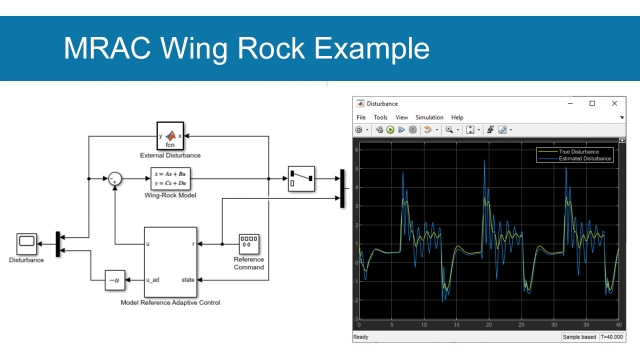
Model Reference Adaptive Control of Aircraft Undergoing Wing Rock
Intermediate
Project
Theory
This example shows how to control roll and roll rate of a delta wing aircraft undergoing wing rock. For this example, the system model is unknown. Therefore, you use model reference adaptive...
See More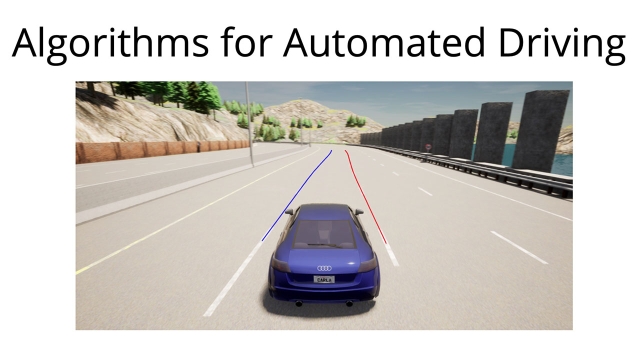
Algorithms for Automated Driving
Intermediate
Project
Application
Each chapter of this (mini-)book guides you in programming one important software component for automated driving. Currently, this book contains two chapters: Lane Detection, and Control...
See More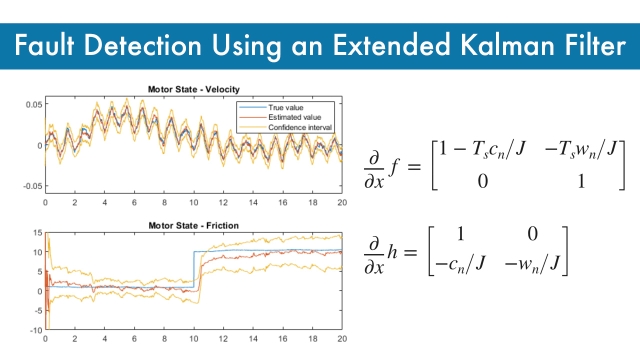
MATLAB Example: Fault Detection Using an Extended Kalman Filter
Intermediate
Project
Application
This example shows how to use an extended Kalman filter for fault detection. The example uses an extended Kalman filter for online estimation of the friction of a simple DC motor...
See More
Reinforcement Learning: An Introduction
Beginner
Book
Theory
From the book introduction:
The idea that we learn by interacting with our environment is probably the first to occur to us when we think about the nature of learning. When an infant plays...
See More
Averaging Methods in Nonlinear Dynamical Systems
Intermediate
Book
Theory
Perturbation theory and in particular normal form theory has shown strong growth during the last decades. So it is not surprising that the authors have presented an extensive revision of the...
See More
Feedback Systems: An Introduction for Scientists and Engineers
Beginner
Book
Theory
This is the wiki for the text Feedback Systems (second edition) by Karl J. Åström and Richard M. Murray. On this resource you will find the complete text of the book as well as additional...
See More
Quanser QUBE-Servo 2: Low-cost Teaching Platform for Controls
Beginner
Hardware
Application
The Quanser QUBE-Servo 2 is a fully integrated, modular servomotor lab experiment designed for teaching mechatronics and control concepts at the undergraduate level. Ideal for teaching speed...
See More
Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields...
Beginner
Book
Theory
From the reviews: "This book is concerned with the application of methods from dynamical systems and bifurcation theories to the study of nonlinear oscillations. Chapter 1 provides a review...
See More
Model Identification and Adaptive Control - From Windsurfing to Telecommunic...
Beginner
Book
Theory
This book is based on a workshop entitled: "Model Identification and Adaptive Control: From Windsurfing to Telecommunications" held in Sydney, Australia, on December 16, 2000. The workshop...
See More
T-RECS System
Beginner
Hardware
Application
The Transportable Rotorcraft Electronic Control System (T-RECS) is a collection of components that can be built into a rotorcraft demonstrator. This hardware can be used as a test bed to...
See More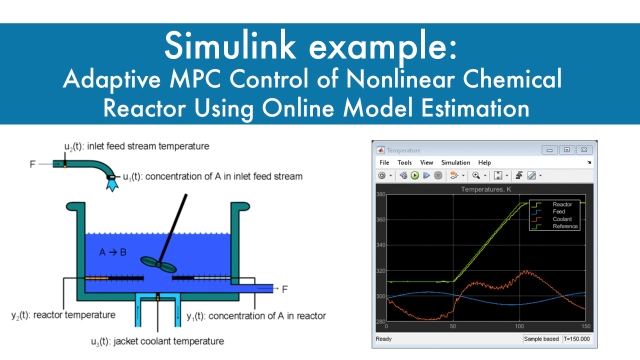
Simulink example: Adaptive MPC Control of Nonlinear Chemical Reactor Using O...
Intermediate
Project
Application
This example shows how to use an Adaptive MPC controller to control a nonlinear continuous stirred tank reactor (CSTR) as it transitions from low conversion rate to high conversion rate.
A...
See More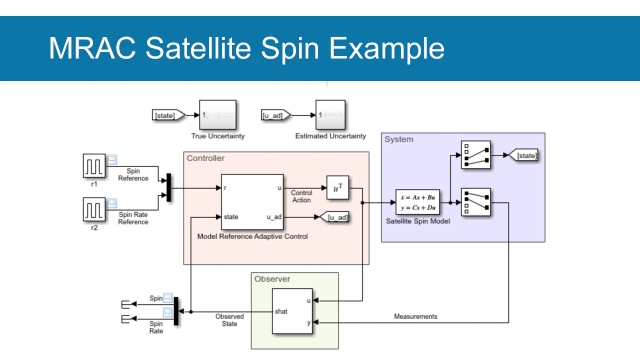
Model Reference Adaptive Control of Satellite Spin
Intermediate
Project
Theory
This example shows how to control satellite spin using model reference adaptive control (MRAC) to make the unknown controlled system match an ideal reference model. The satellite system is...
See More
Design of Embedded Robust Control Systems Using MATLAB®/Simulink®
Intermediate
Book
Demonstration
Robust control theory allows for changes in a system whilst maintaining stability and performance. Applications of this technique are very important for dependable embedded systems, making...
See More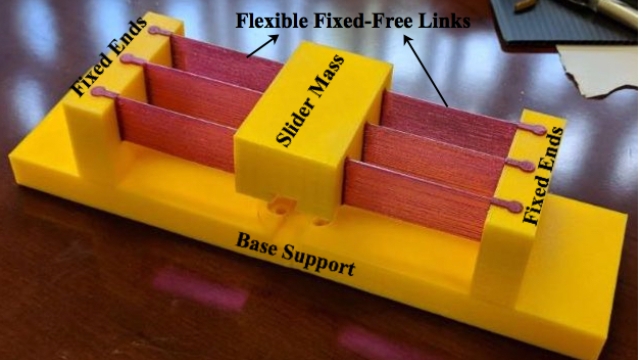
3D Printed Laboratory Equipment to Study Fundamentals of Vibrations: Complia...
180 min
Intermediate
Project
Application
This low-cost, portable, and 3D-Printed Laboratory Equipment (3D-PLE) can be utilized to achieve the following learning outcomes:
- Derive the equation of motion of a translational...

Controls Engineering in the FIRST Robotics Competition
Intermediate
Book
Application
This guide is intended to make an advanced engineering topic approachable so it can be applied by those who aren’t experts in control theory. The intended audience is high school students...
See More
Instrument Kit for ME 316
Beginner
Hardware
Application
This hardware kit accompanies the textbook "Project Based Engineering Instrumentation with CircultPython" by Dr. Carlos Montalvo. Using this hardware and the textbook you’ll build some...
See More
Project Based Engineering Instrumentation with CircuitPython
Beginner
Book
Application
This textbook has been designed with the student and faculty member in mind. First, this textbook goes hand in hand with Engineering Instrumentation taught at the undergraduate level at many...
See More
Into Stability: Walter R Evans and the Story of Root Locus
Beginner
Book
Theory
In the aftermath of World War II, engineers faced challenges their slide rules couldn’t solve. Walter R. Evans wasn’t looking to change the world—he just wanted to help engineers see clearly...
See More