


A* Pathfinding (E01: algorithm explanation)
12 min
Beginner
Video
Theory
Welcome to the first part in a series teaching pathfinding for video games. In this episode we take a look at the A* algorithm and how it works.
See More
Radar Systems Engineering Lecture 4: The Radar Equation
Beginner
Presentation
Theory
This Free Radar Systems Engineering Course (video, audio and screen captured ppt slides) and separate pdf slides) has been developed as a first course in Radar Systems for first year...
See More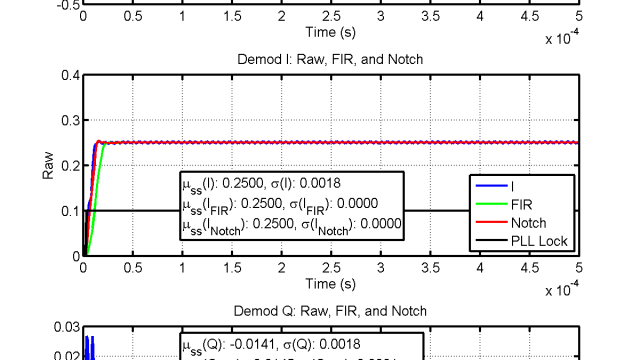
The Demod Squad: A Tutorial on the Utility and Methodologies for Using Modul...
60 min
Intermediate
Peer Reviewed Paper
Theory
This paper is a brief tutorial on methods for using modulated signals in feedback loops, and especially of the different methods and trade offs used for demodulating those signals to get...
See More
Reinforcement Learning for Engineers, Part 5: Overcoming the Practical Chall...
16 min
Beginner
Video
Theory
This video addresses a few challenges that occur when using reinforcement learning for production systems and provides some ways to mitigate them. Even if there aren’t straightforward ways...
See More
Computing Euler Angles: Tracking Attitude Using Quaternions
74 min
Beginner
Video
Theory
In this video we continue our discussion on how to track the attitude of a body in space using quaternions. The quaternion method is similar to the Euler Ki...
See More")
Koopman Spectral Analysis (Continuous Spectrum)
12 min
Intermediate
Video
Theory
In this video, we discuss how to use Koopman theory for dynamical systems with a continuous eigenvalue spectrum. These systems are quite common, such as a pendulum, where the period...
See More
How are Beamforming and Precoding Related?
12 min
Beginner
Video
Theory
Explains the relationship between Beamforming and Precoding in multi-antenna communication systems. Also discusses the relationship to Diversity.
See More
edX course: Dynamics and Control
Beginner
Course
Theory
This is an interactive course about the basic concepts of Systems, Control and their impact in all the human activities. First, the basic concepts of systems, dynamics, structure and control...
See More
System Identification: Regression Models
5 min
Intermediate
Video
Theory
This lecture provides an overview of modern data-driven regression methods for linear and nonlinear system identification, based on the dynamic mode decomposition (DMD), Koopman theory, and...
See More
Nyquist Stability Criterion
15 min
Beginner
Article / Blog
Theory
The Wikipedia article on Nyquist Stability Criterion. This covers the Nyquist plot, the Cauchy argument principle, and the stability criterion itself. A mathematical derivation is also...
See More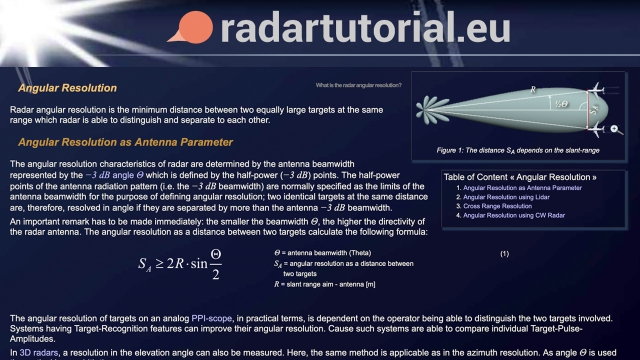
Radar Angular Resolution
Beginner
Article / Blog
Theory
This radartutorial.eu page describes angular resolution. Radar angular resolution is the minimum distance between two equally large targets at the same range which radar is able to...
See More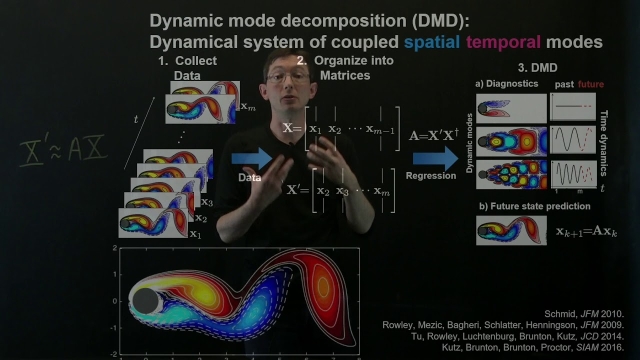
Dynamic Mode Decomposition (Overview)
18 min
Intermediate
Video
Theory
In this video, we introduce the dynamic mode decomposition (DMD), a recent technique to extract spatio-temporal coherent structures directly from high-dimensional data. DMD has been widely...
See More
Neural Network Overview
7 min
Beginner
Video
Theory
This lecture gives an overview of neural networks, which play an important role in machine learning today.
See More
Multi-agent reinforcement learning: An overview
Intermediate
Peer Reviewed Paper
Theory
From the abstract:
Multi-agent systems can be used to address problems in a variety of do- mains, including robotics, distributed control, telecommunications, and economics. The complexity...
See More![The Kalman Filter [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_382.jpg?itok=BhYaUiZA "The Kalman Filter [Control Bootcamp]")
The Kalman Filter [Control Bootcamp]
6 min
Beginner
Video
Theory
Here, we discuss the Kalman Filter, which is an optimal full-state estimator, given Gaussian white noise disturbances and measurement noise.
See More")
Robotic Car - How to read Gyro Datasheets (Part 2)
14 min
Beginner
Video
Theory
Have you ever been lost trying to understand the information in a gyro datasheet? This video should help! In this second part I explain the purpose of a buffer for a MEMS gyro and explain...
See More
Introduction to Anomaly Detection for Engineers
15 min
Beginner
Video
Theory
Anomaly detection is the process of identifying events or patterns that differ from expected behavior. This is important for applications like predictive maintenance but can be hard to...
See More
Feedback Systems: An Introduction for Scientists and Engineers
Beginner
Book
Theory
This is the wiki for the text Feedback Systems (second edition) by Karl J. Åström and Richard M. Murray. On this resource you will find the complete text of the book as well as additional...
See More
Computer Aids for Chemical Engineering
Beginner
Article / Blog
Theory
A curated list of resources for Chemical Engineering students. The resources include syllabi, schedules, course notes, textbooks, screencasts, software, hardware, and other useful links.
See More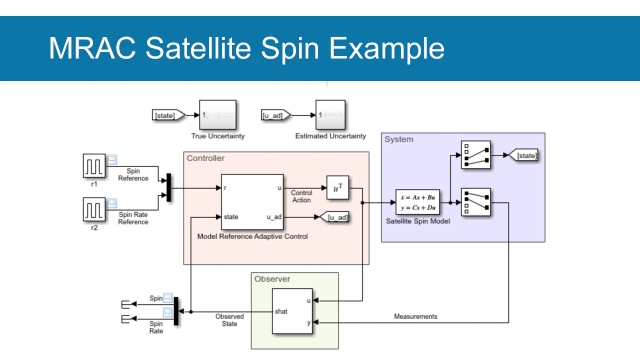
Model Reference Adaptive Control of Satellite Spin
Intermediate
Project
Theory
This example shows how to control satellite spin using model reference adaptive control (MRAC) to make the unknown controlled system match an ideal reference model. The satellite system is...
See More
My Sole Advise to Data Scientists on Coursera & Quora
Beginner
Article / Blog
Theory
This blog post by Tarry Singh answers questions including "How do I get started in the field on Machine Learning, Deep Learning or Artificial Intelligence" and "How do I advance from the...
See More
Wind Tunnel Corrections and Data Reduction
171 min
Advanced
Video
Theory
This is the second of our 3 part series on wind tunnel testing. In this video, we discuss 11 different corrections and data reduction processes that are applied to raw wind tunnel data to...
See More
A simple MEMS gyro model using MATLAB / Simulink
16 min
Beginner
Video
Theory
This video walks through how to model a simple MEMS gyroscope using MATLAB/Simulink. At the end I show you how to linearize this model to use in your linear control loop design and analysis.
See More
Control Bootcamp: Overview
19 min
Beginner
Video
Theory
Overview lecture for bootcamp on optimal and modern control. In this lecture, we discuss the various types of control and the benefits of closed-loop feedback control.
See More
Control Systems in Practice, Part 5: A Better Way to Think About a Notch Fil...
13 min
Beginner
Video
Theory
This video describes an intuitive way to approach notch filter design by thinking about the problem as an inverted, lightly damped, second-order low-pass filter. Then, two additional poles...
See More