

Adaptive Control (Part II) —Modeling the X-15’s Adaptive Flight Control Syst...
Intermediate
Article / Blog
Theory
This blog post shows how to build from scratch a Simulink model of the famous MH-96, the X-15's Adaptive Flight Control System
See More
Autonomous Navigation, Part 6: Metrics for System Assessment
15 min
Beginner
Video
Theory
Take a systems engineering approach to verifying the autonomous navigation system end to end and learn how simulations and physical tests can complement each other. The video also covers a...
See More
Automotive Radar MATLAB Documentation and Examples
Intermediate
Article / Blog
Theory
MATLAB documentation and examples for probabilistic and physics-based radar sensor models, simulation of MIMO antennas, waveforms, I/Q radar signals, micro-Doppler signatures, detections...
See More
How Antennas Work
8 min
Intermediate
Video
Theory
Antennas constitute as a major component in various communication systems, signal transmission and many others. It is important to understand how they work and create propagating waves in...
See More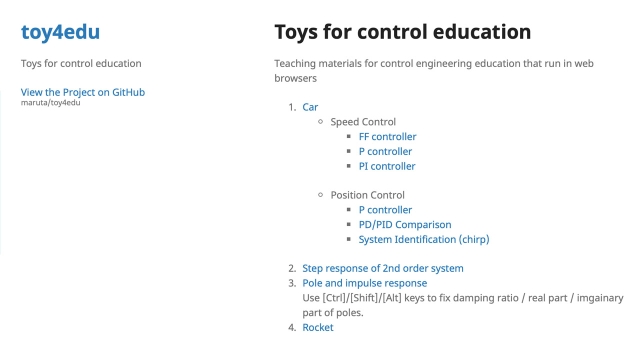
Toys for Control Education
Intermediate
App
Theory
Teaching materials for control engineering education that run in web browsers. Speed control, position control, step response of 2nd order system, pole and impulse response, and rocket.
See More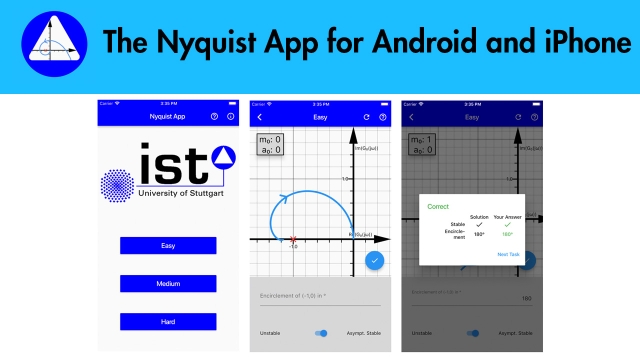
Android and iPhone E-Learning App for Nyquist Stability Criterion
Intermediate
App
Theory
In our Nyquist App, you can analyze the stability of the closed loop by using the Nyquist stability criterion. With the Nyquist stability criterion, you can determine the stability of the...
See More
A Tutorial on PES Pareto Methods for Analysis of Noise Propagation in Feedba...
48 min
Intermediate
Video
Theory
This is the recorded talk of the paper by the same title.
See More
Control Bootcamp: Cautionary Tale About Inverting the Plant Dynamics
5 min
Beginner
Video
Theory
Here we show an example of why it can be a very bad idea to invert some plant dynamics, for example with unstable eigenvalues, for loop shaping.
See More
CS224n: Natural Language Processing with Deep Learning | Winter 2021
Beginner
Course
Theory
This course covers the foundations of the effective modern methods for deep learning applied to NLP, a big picture understanding of human languages and the difficulties in understanding and...
See More
Intro to Data Science: Overview
6 min
Beginner
Video
Theory
This lecture provides an introductory overview to data science. I will discuss the high-level goals of this lecture series, and how data science is about asking and answering questions with...
See More")
Robotic Car - How to read Gyro Datasheets (Part 1)
14 min
Beginner
Video
Theory
Have you ever been lost trying to understand the information in a gyro datasheet? This video should help! In this first part I go through the mechanical characteristics of a MEMS gyro and...
See More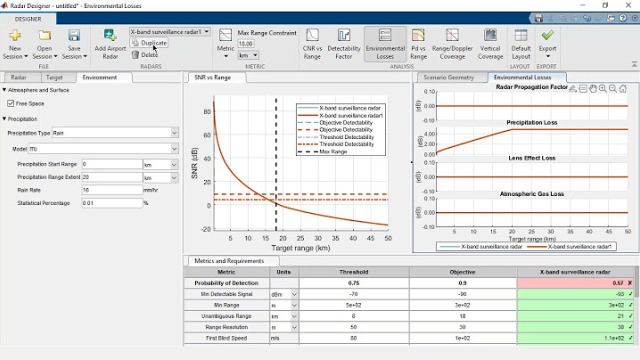
Radar Design with the Radar Designer App
5 min
Beginner
Video
Theory
The Radar Designer app is an interactive tool that assists engineers and system analysts with high-level design and assessment of radar systems at the early stage of radar development.
See More
Data-Driven Control: Overview
24 min
Beginner
Video
Theory
Overview lecture for series on data-driven control. In this lecture, we discuss how machine learning optimization can be used to discover models and effective controllers directly from data...
See More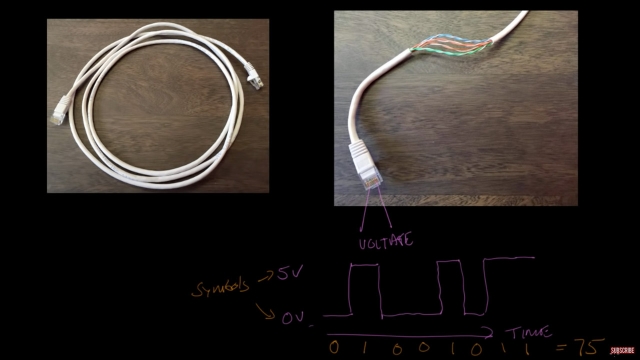
Sending digital information over a wire | Networking tutorial (1 of 13)
4 min
Beginner
Video
Theory
This video lecture is the beginning of an exploration of computer networking with the basics of sending digital information with a copper wire.
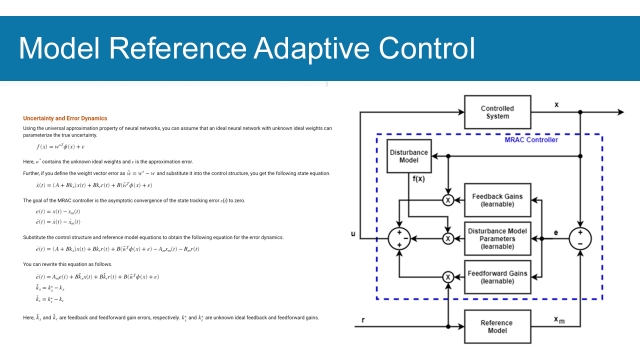
Mathworks Model Reference Adaptive Control Overview
Beginner
Article / Blog
Theory
This website provides an overview of the mathematics behind Model Reference Adaptive Control (MRAC). MRAC is a model-based, real-time adaptive control algorithm that computes control actions...
See More
Multi-Agent Reinforcement Learning: Independent vs Cooperative Agents
Intermediate
Conference Paper
Theory
From the Abstract:
Intelligent human agents exist in a cooperative social environment that facilitates learning. They learn not only by trialand -error, but also through cooperation by...
See More
Reinforcement Learning: An Introduction
Beginner
Book
Theory
From the book introduction:
The idea that we learn by interacting with our environment is probably the first to occur to us when we think about the nature of learning. When an infant plays...
See More
Singular Value Decomposition (SVD): Overview
6 min
Beginner
Video
Theory
This video presents an overview of the singular value decomposition (SVD), which is one of the most widely used algorithms for data processing, reduced-order modeling, and high-dimensional...
See More![Linearizing Around a Fixed Point [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_442.jpg?itok=nt2vg0vl "Linearizing Around a Fixed Point [Control Bootcamp]")
Linearizing Around a Fixed Point [Control Bootcamp]
30 min
Beginner
Video
Theory
This lecture describes how to obtain linear system of equations for a nonlinear system by linearizing about a fixed point. This is worked out for the simple pendulum "by-hand" and in...
See More
Why multichannel beamforming is useful for wireless communication
13 min
Beginner
Video
Theory
Wireless communication systems like 5G and WiFi usually have to serve many users simultaneously and they have to deal with multiple paths between two radios when operating in a scattering...
See More
The Linear Quadratic Regulator
Beginner
Article / Blog
Theory
In these notes, we will derive the solution to the finite-horizon linear quadratic regulator (LQR) problem in several different ways. Fundamentally, LQR can be viewed as a large least...
See More
Math Background for Machine Learning from Carnegie Melon University
Beginner
Course
Theory
This course provides a place for students to practice the necessary mathematical background for further study in machine learning — particularly for taking 10-601 and 10-701. Topics covered...
See More
Control Systems in Practice, Part 1: What Control Systems Engineers Do
14 min
Beginner
Video
Theory
This video walks through the phases of a typical project and describes what it means to be a control systems engineer. It covers the concept formulation phase, in which your job is to help...
See More![Pole Placement for the Inverted Pendulum on a Cart [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_490.jpg?itok=qWteM4RS "Pole Placement for the Inverted Pendulum on a Cart [Control Bootcamp]")
Pole Placement for the Inverted Pendulum on a Cart [Control Bootcamp]
12 min
Beginner
Video
Theory
Here we use the 'place' command in Matlab to design full-state feedback gains to specify the eigenvalues of the closed-loop system. This is demonstrated on the inverted pendulum on a cart.
See More
Gain a better understanding of Root Locus Plots using Matlab
19 min
Beginner
Video
Theory
In this video I go through various ways to use Matlab to plot and visualize the root locus.
See More