

Understanding Control Systems: Open-Loop Control Systems
6 min
Beginner
Video
Theory
This video explores open-loop control systems by walking through some introductory examples.
Learn how open-loop systems are found in everyday appliances like toasters or showers, and...
See More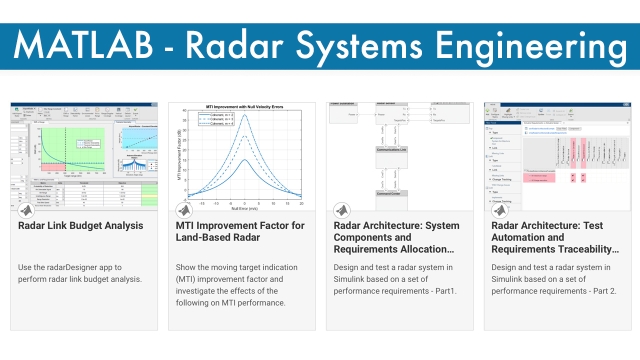
Radar Systems Engineering MATLAB Documentation and Examples
Intermediate
Example
Theory
The functions in this section give you the MATLAB tools needed to evaluate the performance of a radar system. You can use the radar equation to evaluate the radar received signal-to-noise...
See More
Why Choose Deep Learning? Deep Learning for Engineers, Part 1
15 min
Beginner
Video
Theory
This video introduces deep learning from the perspective of solving practical engineering problems. The goal is to provide an introduction to the range of practical engineering problems that...
See More
RADAR Engineering
200 min
Intermediate
Course
Theory
Radar technology is used widely today. The principles involved are very fundamental and every engineering student studies them at least once. This playlist covers Radar Engineering for an EE...
See More
Virtual Labs for control education
Intermediate
Virtual Lab
Theory
This resource provides different links to virtual and remote labs that can be used for control education. Virtual and remote labs are very powerful tools for learning and teaching, that...
See More
A Tutorial on PES Pareto Methods for Analysis of Noise Propagation in Feedba...
Intermediate
Peer Reviewed Paper
Theory
This paper represents a tutorial on the so called PES Pareto methodology of analyzing the sources of noise in a feedback loop. Originally conceived for analyzing noise contributors in...
See More
Creating Discrete-Time Models
Intermediate
Example
Theory
This MATLAB example shows how to create discrete-time linear models using the tf, zpk, ss, and frd commands.
What Is Extremum Seeking Control? | Learning-Based Control
16 min
Beginner
Video
Theory
Get an introduction to extremum seeking control—an adaptive control method for finding an optimal control input or set of system parameters without needing a model of your system, static...
See More
Linear Regression
10 min
Beginner
Video
Theory
Linear regression is a cornerstone of data-driven modeling; here we show how the SVD can be used for linear regression.
See More
System Identification: Koopman with Control
10 min
Intermediate
Video
Theory
This lecture provides an overview of the use of modern Koopman spectral theory for nonlinear control. In particular, we develop control in a coordinate system defined by eigenfunctions of...
See More
Artificial Intelligence
6 min
Beginner
Video
Theory
This lecture discusses artificial intelligence (AI) in the context of data science and machine learning.
See More
Interactive Tools for Control Purposes
Intermediate
App
Theory
This resource provides different links to Interactive Tools that can be used for control education. Interactive Tools are very powerful educational resources as support to learning and...
See More
Discrete control #6: z-plane warping and the bilinear transform
25 min
Beginner
Video
Theory
We’re continuing our journey through discrete control and in this video, we’re going to expand our understanding of the bilinear transform. Along the way, we’ll learn about how this...
See More
Block Diagram Algebra
89 min
Beginner
Video
Theory
In this video we introduce block diagrams (AKA signal flow diagrams). We explore how they are used to describe complex systems as well as how to perform blo...
See More
Understanding Kalman Filters, Part 5: Nonlinear State Estimators
8 min
Beginner
Video
Theory
This video explains the basic concepts behind nonlinear state estimators, including extended Kalman filters, unscented Kalman filters, and particle filters.
A Kalman filter is only defined...
See More
Control Systems in Practice, Part 8: The Gang of Six in Control Theory
18 min
Beginner
Video
Theory
When analyzing feedback systems, we can get caught up thinking solely about the relationship between the reference signal and the output. However, to fully understand how a feedback system...
See More
What Is Fuzzy Logic | Fuzzy Logic Part 1
16 min
Beginner
Video
Theory
This video introduces fuzzy logic and explains how you can use it to design a fuzzy inference system (FIS), which is a powerful way to use human experience to design complex systems...
See More
Perspectives on Control-Relevant Identification Through the Use of Interacti...
Intermediate
Peer Reviewed Paper
Theory
This paper presents a control-relevant identification methodology through an intuitive interactive tool called "Interactive Tool for Control Relevant Identification (ITCRI)". ITCRI...
See More
The Institute for Systems Theory and Automatic Control MATLAB Apps
Intermediate
App
Theory
The Institute for Systems Theory and Automatic Control offers 5 Matlab Apps on the topics of the Nyquist Criterion, Robustness and Stability, Loopshaping, Controllability and Observability...
See More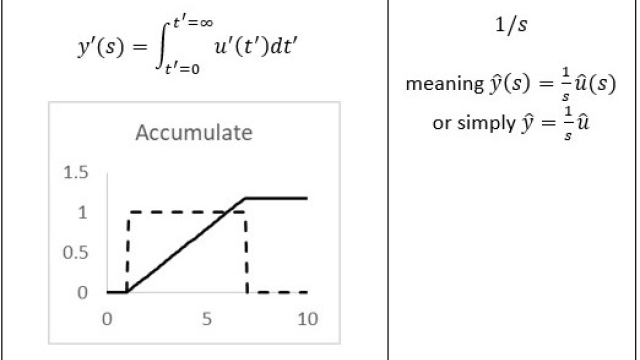
No! Not Laplace Transforms
60 min
Intermediate
Course
Theory
In my 13-year industrial career, I never used Laplace transforms. However, transfer functions and block diagram notation are efficient methods to describe dynamic behaviors, and are often...
See More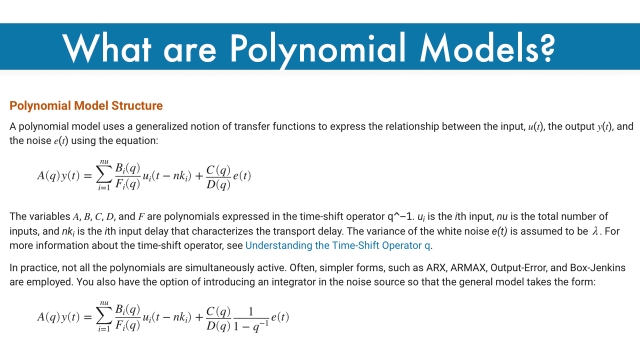
What are Polynomial Models?
Intermediate
Article / Blog
Theory
This Mathworks page provides an overview of polynomial models.
See More
Understanding the Discrete Fourier Transform and the FFT
19 min
Beginner
Video
Theory
The discrete Fourier transform (DFT) transforms discrete time-domain signals into the frequency domain. The most efficient way to compute the DFT is using a fast Fourier transform (FFT)...
See More
Kristin Pettersen Lectures on Nonlinear Control
300 min
Intermediate
Video
Theory
Kristin Pettersen Lectures on Nonlinear Control, including many of the necessary mathematical tools and concepts.
See More
Online and Recursive System Identification | System Identification, Part 4
19 min
Beginner
Video
Theory
Online system identification algorithms estimate the parameters and states of a model as new data is measured and available in real-time or near real-time. Brian Douglas covers what online...
See More
Video Lectures on Automatic Control
Beginner
Video
Theory
A collection of 32 video lectures on automatic control by Dr. Rajesh Joseph Abraham.
See More