

Understanding Sensor Fusion and Tracking, Part 2: Fusing a Mag, Accel, and G...
16 min
Beginner
Video
Theory
This video describes how we can use a magnetometer, accelerometer, and a gyro to estimate an object’s orientation. The goal is to show how these sensors contribute to the solution, and to...
See More
Time Domain Analysis: Performance Metrics for a First Order System
78 min
Beginner
Video
Theory
In this video we introduce the concept of time domain analysis for dynamic systems. We examine a first order dynamic system and derive how various performan...
See More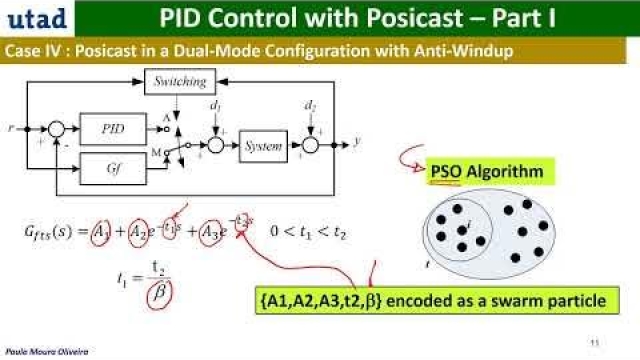
PID Control with Posicast 7 - ( In English )
12 min
Beginner
Video
Theory
In this video closed-loop configurations with PID controllers and Posicast are introduced.
See More
Lecture 30: Canonical Forms
40 min
Beginner
Video
Theory
")
Koopman Spectral Analysis (Representations)
16 min
Intermediate
Video
Theory
In this video, we explore how to obtain finite-dimensional representations of the Koopman operator from data, using regression.
See More
Solving the 1D Heat Equation
47 min
Beginner
Video
Theory
In this video we simplify the general heat equation to look at only a single spatial variable, thereby obtaining the 1D heat equation. We solving the result...
See More
Bode Plots by Hand: Poles and Zeros at the Origin
8 min
Beginner
Video
Theory
This is a continuation of the Control Systems Lectures. This video describes the benefit of being able to approximate a Bode plot by hand and explains what a Bode plot looks like for a...
See More
SVD and Optimal Truncation
11 min
Intermediate
Video
Theory
This video describes how to truncate the singular value decomposition (SVD) for matrix approximation.
See More
Laplace domain – tutorial 4: Laplace transform examples
20 min
Beginner
Video
Theory
In this video, we solve lots of examples to practice how to quickly find Laplace transform using the table of pairs & properties and five golden rules on ROC...
See More
Stanford CS229: Machine Learning | Autumn 2018
Beginner
Video
Theory
Autumn 2018 Stanford course on machine learning by Andrew Ng.
See More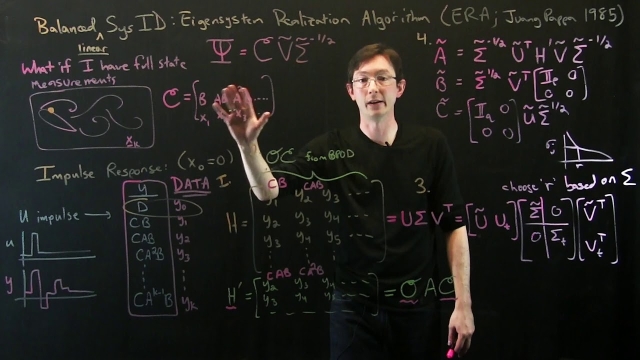
Data-Driven Control: Balanced Models with ERA
6 min
Intermediate
Video
Theory
In this lecture, we connect the eigensystem realization algorithm (ERA) to balanced proper orthogonal decomposition (BPOD). In particular, if enough data is collected, then ERA produces...
See More
Process Control Introduction
14 min
Beginner
Video
Theory
An overview on state variables, inputs (manipulated and disturbance variables), outputs (measured state variables), and an example on the balance equations w...
See More
Frequency domain – tutorial 4: Gibbs phenomenon
4 min
Beginner
Video
Theory
In this video, we quickly review the Gibbs phenomenon which involves two facts:1) Fourier sums overshoot at a jump discontinuity2) overshoot does not disapp...
See More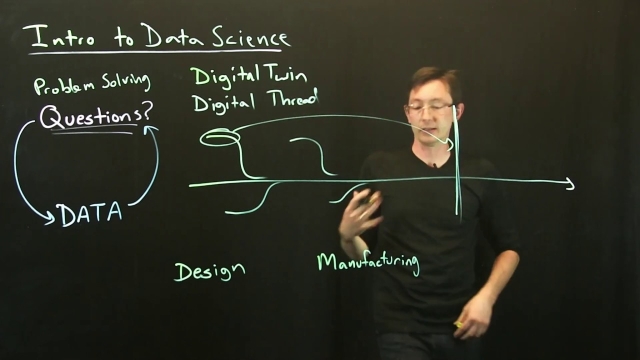
Digital Twins
8 min
Beginner
Video
Theory
This lecture discusses the use of data-driven digital twins in advanced model-based design and engineering, and the related digital thread, which ties together the data throughout an entire...
See More
IMC based PID Design for a First Order Process
8 min
Beginner
Video
Theory
IMC based PID Design for a First Order Process
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 15 - Batch Re...
79 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group
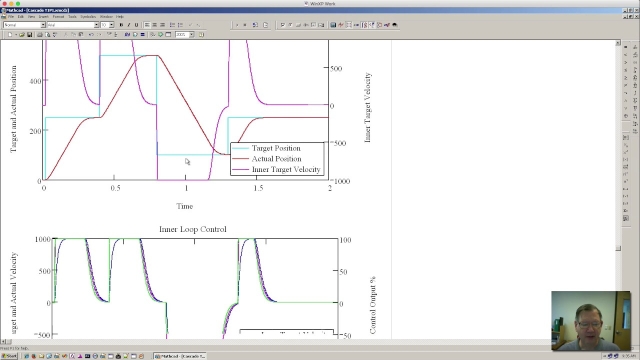
Peter Ponders PID - Cascade Control Part2
14 min
Beginner
Video
Theory
The inner loop pole locations and gains are calculated first so the inner loop pole locations are determined by the user. The outer loop poles are still pla...
See More
Extremum Seeking Control: Challenging Example
8 min
Intermediate
Video
Theory
This lecture explores the use of extremum-seeking control (ESC) to solve a challenging control problem with a right-half plane zero.
See More
Working with Synthetic Data | Deep Learning for Engineers, Part 2
18 min
Beginner
Video
Theory
This video covers the first step in deep learning: having access to data. Part of making the decision of whether deep learning is right for your project comes down to the type and amount of...
See More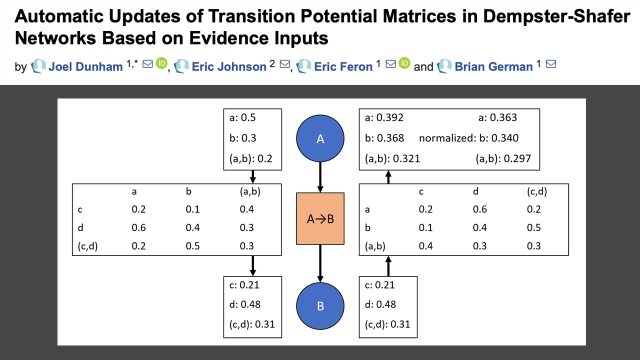
Automatic Updates of Transition Potential Matrices in Dempster-Shafer Networ...
Advanced
Peer Reviewed Paper
Theory
Journal article that develops an evidential reasoning network capable of learning/updating the relationships between Frames of Discernment (the sets over which Dempster-Shafer reasons that...
See More with Smith Predictor")
SOPDT Sliding Mode Control ( SMC ) with Smith Predictor
6 min
Beginner
Video
Theory

Solving the Heat Equation with the Fourier Transform
11 min
Beginner
Video
Theory
This video describes how the Fourier Transform can be used to solve the heat equation. In fact, the Fourier transform is a change of coordinates into the eigenvector coordinates for the...
See More")
Principal Component Analysis (PCA)
13 min
Beginner
Video
Theory
Principal component analysis (PCA) is a workhorse algorithm in statistics, where dominant correlation patterns are extracted from high-dimensional data.
See More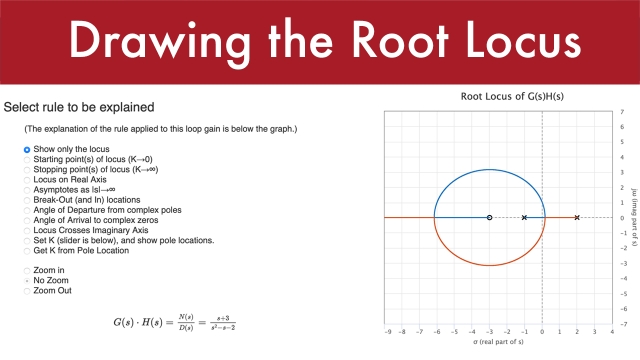
Drawing the root locus (Interactive Tool)
Beginner
App
Theory
This page was developed to help student learn how to sketch the root locus by hand. You can enter a numerator and denominator for G(s)H(s) (i.e., the loop gain) and the program will guide...
See More
Lecture 12: Steady state error
26 min
Beginner
Video
Theory