


Standing Waves Demonstration
44 min
Beginner
Video
Theory
In this video we demonstrate standing waves. We show how the system can be excited by oscillating at specific frequencies to generating standing waves. The...
See More
Designing a Lead Compensator with Bode Plot
14 min
Beginner
Video
Theory
This video walks through a phase lead compensator example using the Bode Plot method.
See More
Digital Twins
8 min
Beginner
Video
Theory
This lecture discusses the use of data-driven digital twins in advanced model-based design and engineering, and the related digital thread, which ties together the data throughout an entire...
See More
Laplace domain – tutorial 4: Laplace transform examples
20 min
Beginner
Video
Theory
In this video, we solve lots of examples to practice how to quickly find Laplace transform using the table of pairs & properties and five golden rules on ROC...
See More
Frequency domain – tutorial 7: Fourier transform examples marathon
46 min
Beginner
Video
Theory
In this video, we solve lots of lots examples to practice how to quickly find Fourier transform using table of pairs and properties. The learning objective i...
See More
Peter Ponders PID - Lead/lag closed loop control
20 min
Beginner
Video
Theory

Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 9 - Policy Gr...
74 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group
See More
Machine Learning Control: Genetic Programming
12 min
Beginner
Video
Theory
This lecture explores the use of genetic programming to simultaneously optimize the structure and parameters of an effective control law.
See More
Inputs and Outputs as defined by a Process Control Engineer
7 min
Beginner
Video
Theory
Defining process inputs and outputs is a lot more complicated than I initially thought when I was learning about process control. In this video, I share how ...
See More
RL Course by David Silver - Lecture 5: Model Free Control
96 min
Intermediate
Video
Theory
Dives into On Policy Monte-Carlo Control and Temporal Difference Learning, as well as Off-Policy Learning.
See More
Understanding Model Predictive Control, Part 4: Adaptive, Gain-Scheduled and...
6 min
Beginner
Video
Theory
This video explains the type of MPC controller you can use based on your plant model, constraints, and cost function. An optimization problem with these properties is a convex one, and you...
See More

Lecture 2: LTI Systems, Laplace Transform Review and Transfer Function
38 min
Beginner
Video
Theory
Constraint Enforcement for Improved Safety | Learning-Based Control
14 min
Beginner
Video
Theory
Learn about the constraints of your system. Then see a how to enforce those constraints so the system does not violate them. Constraint enforcement is important for safety-critical...
See More
Simple Examples of PID Control
13 min
Beginner
Video
Theory
In this video I continue the topic of PID control. We walk through a simple control system and visualize how each of the three paths, P, I, and D, all address specific problems that arise...
See More
Transfer Function to State Space
56 min
Beginner
Video
Theory
In this video we show how to transform a transfer function to an equivalent state space representation. We will derive various transformations such as contr...
See More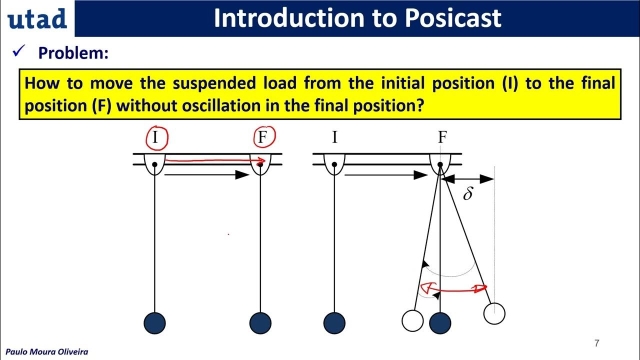
Posicast Control - 1 ( In English)
11 min
Beginner
Video
Theory
This video is an introduction to a learning journey about Posicast Control structured as follows: - Preface - Motivation - Introduction to Posicast Control - Half-Cycle Posicast
See More
Lecture 17: Introduction to Compensators/Controllers
35 min
Beginner
Video
Theory

Routh-Hurwitz Criterion, Special Cases
13 min
Beginner
Video
Theory
This video presents two special cases that you can encounter when filling out the Routh Array. The first case is when there is a zero in a row with at least one non-zero element following...
See More
Understanding and Sketching the Root Locus
176 min
Beginner
Video
Theory
In this video we discuss how to sketch the root locus for a system by developing a series of 5 core rules augmented by 5 supplemental rules (for a total of 1...
See More
Numerically Linearizing a Dynamic System
104 min
Intermediate
Video
Theory
In this video we show how to linearize a dynamic system using numerical techniques. In other words, the linearization process does not require an analytical description of the system. This...
See More
Deriving Percent Overshoot, Settling Time, and Other Performance Metrics
59 min
Beginner
Video
Theory
In this video we examine a second order dynamic system and derive how various performance metrics (such as time to first peak, magnitude at first peak, perce...
See More![Controllability and the Discrete-Time Impulse Response [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_302.jpg?itok=xjXmM9_U)
Controllability and the Discrete-Time Impulse Response [Control Bootcamp]
5 min
Beginner
Video
Theory
This lecture derives the impulse response for a discrete-time system and relates this to the controllability matrix.
See More")
Koopman Spectral Analysis (Multiscale systems)
5 min
Intermediate
Video
Theory
In this video, we discuss recent applications of data-driven Koopman theory to multi-scale systems.
See More
Data-Driven Control: Change of Variables in Control Systems
14 min
Intermediate
Video
Theory
In this lecture, we discuss how linear control systems transform under a change of coordinates in the state variable. This will be useful to derive balancing transformations that identify...
See More