


Frequency domain – tutorial 10: modulation
22 min
Beginner
Video
Theory
In this video, we learn about modulation technique which is commonly used in communication systems to send information from transmitter to receiver. The foll...
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 5 - Value Fun...
82 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group
See More
Machine Learning Overview
7 min
Beginner
Video
Theory
This lecture provides an overview of machine learning, and how it fits into this introductory video sequence on data science. We discuss how machine learning involves "modeling with data".
See More
Peter Ponders PID - FeedForwards - Basics - What they do
20 min
Beginner
Video
Theory

Intro to Process Control
6 min
Beginner
Video
Theory
I discuss the motivation and introduce the logic behind controllers that engineers design to respond to errors in outputs (deviations from set points). P and...
See More
RL Course by David Silver - Lecture 3: Planning by Dynamic Programming
99 min
Intermediate
Video
Theory
Introduces policy evaluation and iteration, value iteration, extensions to dynamic programming and contraction mapping.
See More
Neural Networks and Deep Learning
7 min
Beginner
Video
Theory
This lecture explores the recent explosion of interest in neural networks and deep learning in the context of 1) vast and increasing data sets, and 2) rapidly improving computational...
See More
Routh Array and Stability
7 min
Beginner
Video
Theory
I show how we can find the range of allowed controller gains for a system that will allow us to maintain stability using a Routh Array.
See More
The Fourier Transform and Convolution Integrals
10 min
Beginner
Video
Theory
This video describes how the Fourier Transform maps the convolution integral of two functions to the product of their respective Fourier Transforms.
See More
Nonhomogeneous Linear Ordinary Differential Equations
70 min
Beginner
Video
Theory
In the previous video (https://youtu.be/3Kox-3APznI) we examined solving homogeneous linear ordinary differential equations (the forcing function was equal t...
See More
Control Systems with MATLAB - Time Domain Analysis
35 min
Beginner
Video
Theory

Partial Fraction Expansion/Decomposition
59 min
Beginner
Video
Theory
In this video we discuss how to perform partial fraction expansion (PFE) to rewrite a ratio of polynomials as simpler expressions. Topics and time stamps:(0...
See More
Tutorial on Root Locus
56 min
Beginner
Video
Theory
Understanding Sensor Fusion and Tracking, Part 2: Fusing a Mag, Accel, and G...
16 min
Beginner
Video
Theory
This video describes how we can use a magnetometer, accelerometer, and a gyro to estimate an object’s orientation. The goal is to show how these sensors contribute to the solution, and to...
See More
Time Domain Analysis: Performance Metrics for a First Order System
78 min
Beginner
Video
Theory
In this video we introduce the concept of time domain analysis for dynamic systems. We examine a first order dynamic system and derive how various performan...
See More
Vector Derivatives (the Equation of Coriolis) and the Angular Velocity Vecto...
72 min
Intermediate
Video
Theory
In this video we develop the Equation of Coriolis which describes how a vector in a rotating reference frame changes from the perspective of an observer in a non-rotating reference frame. We...
See More")
Koopman Spectral Analysis (Representations)
16 min
Intermediate
Video
Theory
In this video, we explore how to obtain finite-dimensional representations of the Koopman operator from data, using regression.
See More
Why Learn Control Theory
5 min
Beginner
Video
Theory
In this video I present a few reasons why learning control theory is important and try to give some motivation to continue learning.
See More")
Frequency domain – tutorial 13: sampling (theory of everything in signal pro...
25 min
Beginner
Video
Theory
In this video, we learn about sampling which enables us to travel from analog to digital world. The following materials are covered:1) why traveling to the ...
See More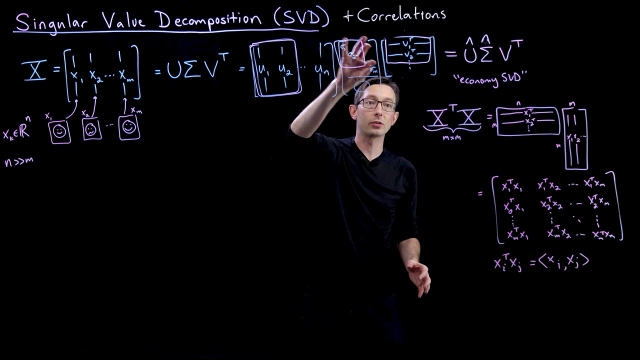
Singular Value Decomposition (SVD): Dominant Correlations
11 min
Intermediate
Video
Theory
This lectures discusses how the SVD captures dominant correlations in a matrix of data.
See More
Data-Driven Control: Balancing Transformation
11 min
Intermediate
Video
Theory
In this lecture, we derive the balancing coordinate transformation that makes the controllability and observability Gramians equal and diagonal. This is the critical step in balanced model...
See More
Time domain - tutorial 9: convolution examples
25 min
Beginner
Video
Theory
In this video, we use a systematic approach to solve lots of examples on convolution. By the end of this lecture, you should be able to find convolution betw...
See More
Control Systems Lectures - LTI Systems
7 min
Beginner
Video
Theory
This lecture describes what it means when we say a system is linear and time invariant. I also try to give an example as to why these systems are so important when designing control systems...
See More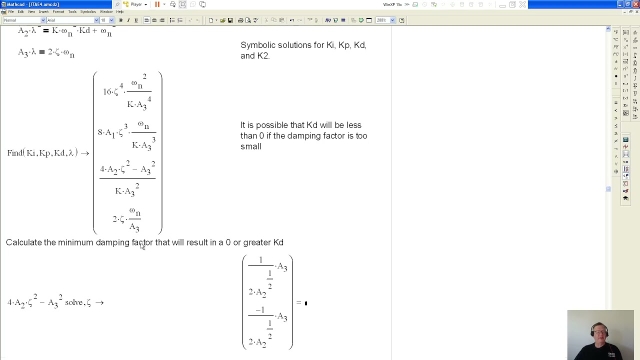
Peter Ponders PID - Integrated Time Absolute Error - 4 Pole example
17 min
Beginner
Video
Theory
This video shows how to calculate the coefficients for a 4 pole ITAE and how to use the 4 pole ITAE to calculate closed loop controller gains.
See More
Dynamic Behavior and Input Types in Process Control
13 min
Beginner
Video
Theory
An introduction to the four types of dynamic behavior and five types of inputs (step, ramp, pulse, impulse, and sinusoidal), and why transfer functions are u...
See More