


Lecture 15: Root Locus
53 min
Beginner
Video
Theory

Introduction to Partial Differential Equations
52 min
Beginner
Video
Theory
This is the first lesson in a multi-video discussion focused on partial differential equations (PDEs).In this video we introduce PDEs and compare them with o...
See More
Designing a Lead Compensator with Root Locus
13 min
Beginner
Video
Theory
This video walks through a phase lead compensator example using the Root Locus method.
See More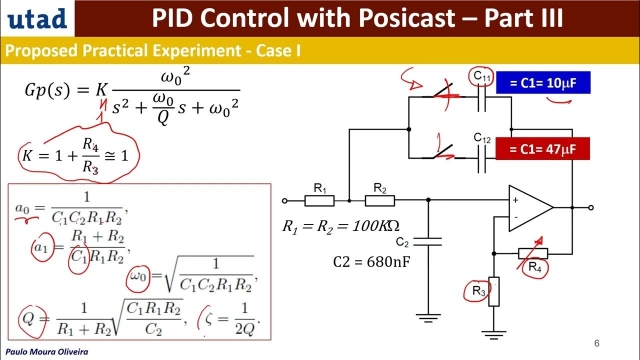
PID Control with Posicast, 9 - (In English)
11 min
Beginner
Video
Theory
This is part III of PID control with Posicast
See More
Lecture 1 Introduction to Automatic Control
29 min
Beginner
Video
Theory

Time domain - tutorial 4: transformation examples
5 min
Beginner
Video
Theory
In this video, we solve examples to practice different signal transformations using a systematic approach. By the end of this lecture, you should be able to ...
See More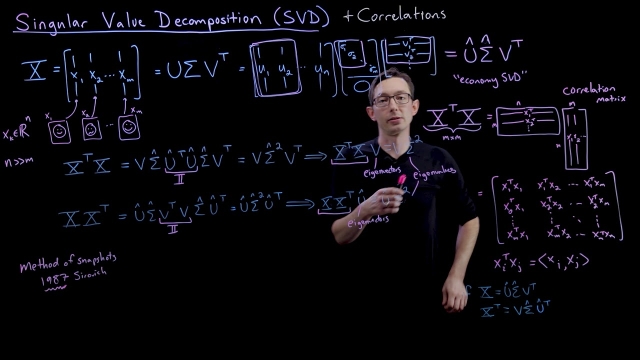
SVD Method of Snapshots
4 min
Beginner
Video
Theory
This video describes how to compute the singular value decomposition (SVD) using the method of snapshots, by Sirovich 1987.
See More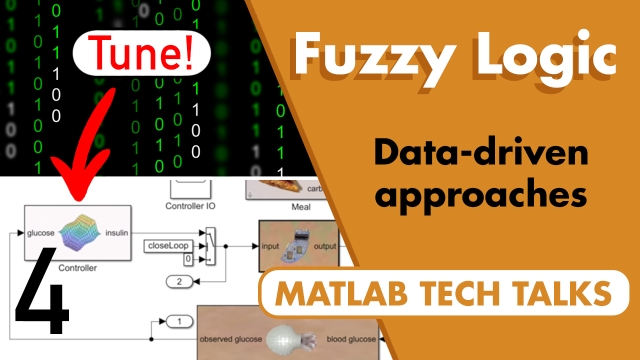
Tuning a Fuzzy Logic Controller with Data | Fuzzy Logic, Part 4
18 min
Beginner
Video
Theory
This video covers the basics of data-driven approaches to tuning fuzzy inference systems. See what it means to find an optimal solution, which fuzzy inference parameters are being tuned...
See More
Particle Filter Explained without Equations
7 min
Beginner
Video
Theory
This video provides a quick graphical introduction to the particle filter. It does a good job building some intuition behind the filter without ever touching on any mathematics. It's worth a...
See More
Laplace domain – tutorial 6: Transfer function & system properties
24 min
Beginner
Video
Theory
In this video, we learn about transfer function and system properties. The following materials are covered:1) what is a transfer function?2) relation between...
See More
Control Bootcamp: Loop shaping
7 min
Beginner
Video
Theory
This video explores shaping the loop transfer function to have desirable sensitivity and complementary sensitivity.
See More
Relative Gain Array RGA Analysis
6 min
Beginner
Video
Theory
I cover how you can find the relative gain array from the steady state gain array, and interpret the results to determine which input to pair with which outp...
See More
Bode Plots by Hand: Real Poles or Zeros
13 min
Beginner
Video
Theory
This is a continuation of the Control Systems Lectures. This video describes the benefit of being able to approximate a Bode plot by hand and explains what a Bode plot looks like for a...
See More
RL Course by David Silver - Lecture 1: Introduction to Reinforcement Learnin...
88 min
Intermediate
Video
Theory
Introduces reinforcment learning (RL), an overview of agents and some classic RL problems.
See More
Sparse Identification of Nonlinear Dynamics for Model Predictive Control
12 min
Intermediate
Video
Theory
This lecture shows how to use sparse identification of nonlinear dynamics with control (SINDYc) with model predictive control to control nonlinear systems purely from data.
See More
Introductory course on aerial robotics, University of Pennsylvania
Beginner
Video
Theory
This course exposes you to the mechanics, design, control, and planning of robotic flight in 3 dimensional environments for micro-aerial vehicles, with an emphasis on quadrotors.
See More
State Space in Process Control
10 min
Beginner
Video
Theory
An overview on how we can derive a state space model from a given set of state variables and inputs, as well as an intro to deviation variables. This is part...
See More
Data Preprocessing and the Short-Time Fourier Transform | Deep Learning for ...
16 min
Beginner
Video
Theory
Data in its raw form might not be ideal for training a network. There are some changes we can make to the data that are often desired or sometimes necessary in order to make training faster...
See More
Peter Ponders PID - InputShaping
21 min
Beginner
Video
Theory
Dynamic Mode Decomposition (Examples)
7 min
Intermediate
Video
Theory
In this video, we continue to explore the dynamic mode decomposition (DMD). In particular, we look at recent methodological extensions and application areas in fluid dynamics, disease...
See More
Sketching Root Locus Part 2
16 min
Beginner
Video
Theory
This is the second part of how to sketch a root locus by hand. However instead of following the normal rules for sketching a locus that you'd see in a book, I decided to explain the rules...
See More
Peter Ponders PID - Root Locus Is Useless
25 min
Beginner
Video
Theory

Designing a PID Controller Using the Ziegler-Nichols Method
33 min
Beginner
Video
Theory
In this video we discuss how to use the Ziegler-Nichols method to choose PID controller gains. In addition to discussing the method and providing a Matlab i...
See More")
Introduction to the Fourier Transform (Part 1)
13 min
Beginner
Video
Theory
This video is an introduction to the Fourier Transform. I try to give a little bit of background into what the transform does and then I go step by step through explaining the Inverse...
See More
Bode Plots of Complex Transfer Functions
65 min
Beginner
Video
Theory
In this video we discuss how to generate a bode plot of a complex transfer function by decomposing it into the individual components. We then show how one c...
See More