

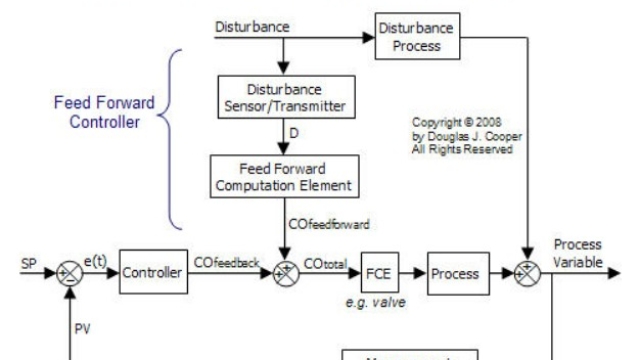
Feedforward Control
Intermediate
Article / Blog
Application
When a Ratio Control strategy takes action too soon, use Feedforward to temper the dynamics. When a disturbance can be measured, but would not be a ratio of the control output use...
See More
Learning Dynamic Systems & Control Engineering with a Video Game
Intermediate
Video
Demonstration
Engineering Students at Northern Illinois University are learning one of their core subjects, Dynamic Systems & Control, with the aid of a video game.
See More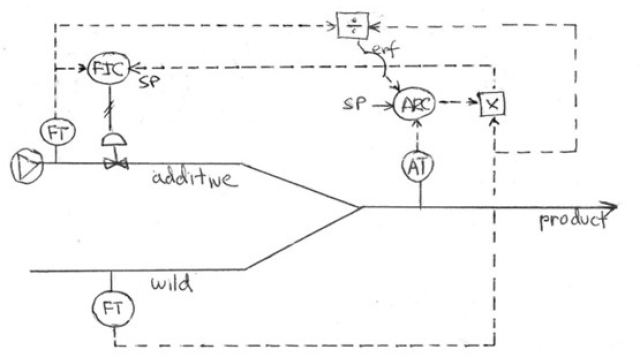
Ratio Control and Scaled Signal Calculations
15 min
Intermediate
Article / Blog
Application
When and how to use Ratio Control and use Scaled Signals
See More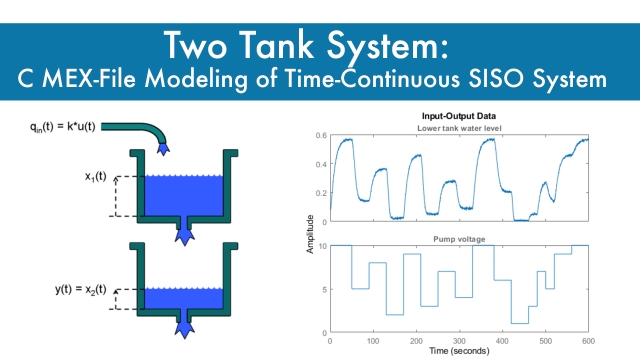
Two Tank System: C MEX-File Modeling of Time-Continuous SISO System
Intermediate
Software
Demonstration
This MATLAB example shows how to perform IDNLGREY modeling based on C MEX model files. It uses a simple system where nonlinear state space modeling really pays off.
See More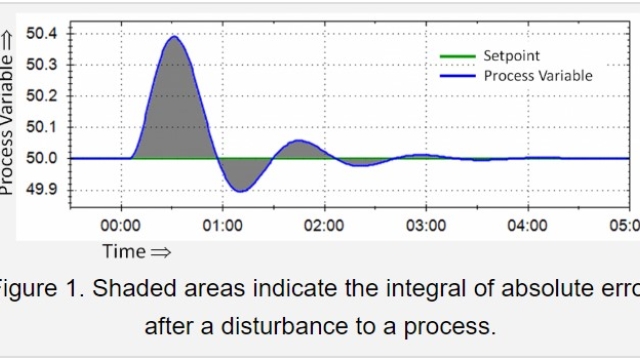
Min IAE Tuning
15 min
Intermediate
Article / Blog
Application
Procedure and Commentary on tuning for minimum Integral of the Absolute Error
See More
Adaptive Control (Part II) —Modeling the X-15’s Adaptive Flight Control Syst...
Intermediate
Article / Blog
Theory
This blog post shows how to build from scratch a Simulink model of the famous MH-96, the X-15's Adaptive Flight Control System
See More
Why the Riccati Equation Is important for LQR Control
14 min
Intermediate
Video
Theory
This Tech Talk looks at an optimal controller called linear quadratic regulator, or LQR, and shows why the Riccati equation plays such an important role in solving it efficiently. The talk...
See More
MATLAB Command: resid
Intermediate
Article / Blog
Application
This MATLAB command is part of the system identification toolbox and provides a way to compute and test residuals.
See More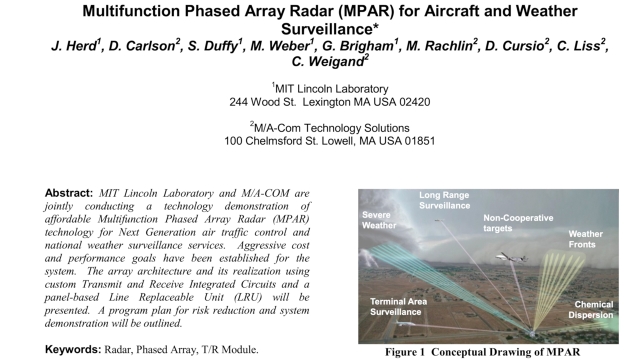
Multifunction Phased Array Radar (MPAR) for Aircraft and Weather Surveillanc...
Intermediate
Peer Reviewed Paper
Application
MIT Lincoln Laboratory and M/A-COM are jointly conducting a technology demonstration of affordable Multifunction Phased Array Radar (MPAR) technology for Next Generation air traffic control...
See More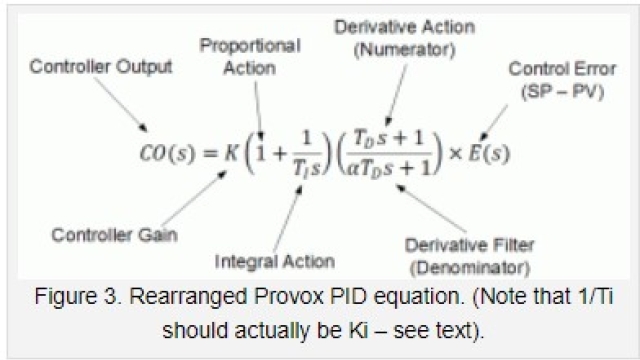
Decoding a Laplace Representation of a Controller
20 min
Intermediate
Article / Blog
Application
A how to relate the Laplace notation to the PID controller variation and features
See More
First Order Plus Dead Time Tuning App for PI Controllers
Intermediate
App
Application
The FOPTD_PI Tool is a Matlab-Interactive tuning tool of PI controllers for First Order PlusTime Delay processes. It can be used to teach basic control concepts based on a set of PI tuning...
See More
MATLAB scripts for "Nonlinear System Identification | System Identification,...
Intermediate
Software
Demonstration
This Github repo contains the data files and MATLAB scripts that were used in "Nonlinear System Identification | System Identification, Part 3".
See More
Automotive Radar MATLAB Documentation and Examples
Intermediate
Article / Blog
Theory
MATLAB documentation and examples for probabilistic and physics-based radar sensor models, simulation of MIMO antennas, waveforms, I/Q radar signals, micro-Doppler signatures, detections...
See More
Averaging Methods in Nonlinear Dynamical Systems
Intermediate
Book
Theory
Perturbation theory and in particular normal form theory has shown strong growth during the last decades. So it is not surprising that the authors have presented an extensive revision of the...
See More
MATLAB Example: Train Multiple Agents for Area Coverage
Intermediate
Example
Application
This example demonstrates a multi-agent collaborative-competitive task in which you train three proximal policy optimization (PPO) agents to explore all areas within a grid-world environment...
See More
System Identification: Full-State Models with Control
10 min
Intermediate
Video
Theory
This lecture provides an overview of modern data-driven regression methods for linear and nonlinear system identification, based on the dynamic mode decomposition (DMD), Koopman theory, and...
See More
Interactive Tool for Loop Shaping understanding based on PID control
Intermediate
App
Application
Loop shaping is a design method where it is attempted to choose a controller such that the loop transfer function obtains the desired shape. In this module the loop transfer function is...
See More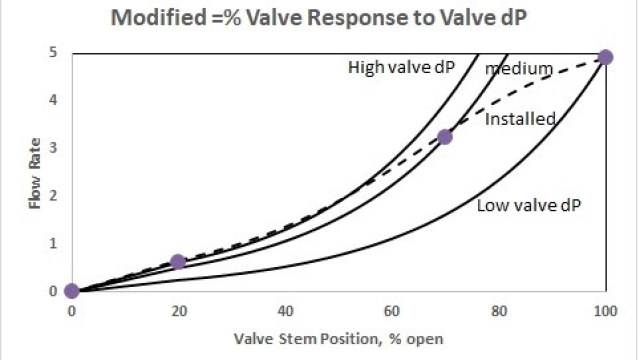
Understanding Valve Flow Characteristics
20 min
Intermediate
Article / Blog
Application
The response of flow rate through a control valve depends on the friction losses in the piping in which it is installed as well as the controller signal. The installed characteristic (a...
See More
RL Course by David Silver - Lecture 7: Policy Gradient Methods
94 min
Intermediate
Video
Theory
Looks at different policy gradients, including Finite Difference, Monte-Carlo and Actor Critic.
See More
IIR Filters - Theory and Implementation (STM32)
20 min
Intermediate
Video
Application
Tutorial on IIR (Infinite Impulse Response) digital filters, including digital filtering overview, IIR filter theory, FIR vs IIR, Z-transform design/analysis, design using analogue...
See More
Data-Driven Control: BPOD and Output Projection
5 min
Intermediate
Video
Theory
In this lecture, we introduce the output projection for balancing proper orthogonal decomposition (BPOD), to reduce the number of adjoint simulations required when the number of measurements...
See More
Gimbal Lock in reference to the Apollo missions
4 min
Intermediate
Video
Theory
A gimbal is a pivoted support that permits rotation of an object about an axis. For this reason, a set of three axes gimbals are used in spacecrafts to help with orientation attitude control...
See More
SVD and Optimal Truncation
11 min
Intermediate
Video
Theory
This video describes how to truncate the singular value decomposition (SVD) for matrix approximation.
See More![Linear Regression 2 [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_437.jpg?itok=jfYpmzNR "Linear Regression 2 [Python]")
Linear Regression 2 [Python]
5 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used for linear regression in Python (part 2).
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 1 - Introduct...
66 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group