

Multi-Agent Reinforcement Learning: Independent vs Cooperative Agents
Intermediate
Conference Paper
Theory
From the Abstract:
Intelligent human agents exist in a cooperative social environment that facilitates learning. They learn not only by trialand -error, but also through cooperation by...
See More
System Identification: Dynamic Mode Decomposition with Control
11 min
Intermediate
Video
Theory
This lecture provides an overview of dynamic mode decomposition with control (DMDc) for full-state system identification. DMDc is a least-squares regression technique based on the singular...
See More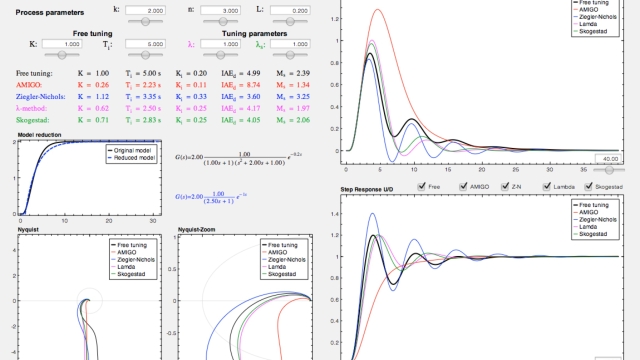
Interactive Tool about PID tuning rules
Intermediate
App
Application
Hundreds of PID design methods are available in literature. Many of them are very similar and sometimes it is not straightforward to understand their purposes. This interactive software tool...
See More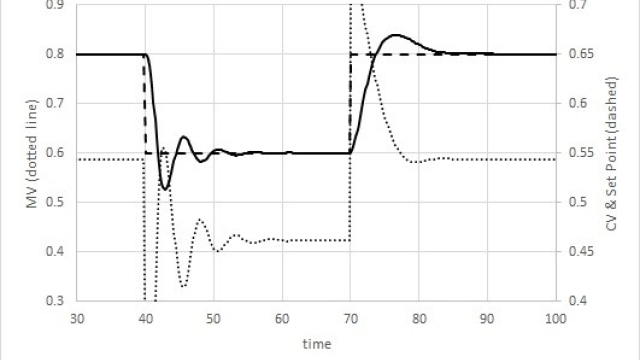
Tuning PID Controllers
20 min
Intermediate
Article / Blog
Application
Tuning controllers is the procedure for choosing the coefficient values for the P, I and D modes. It must be simple to execute, fast, and non-disruptive to the operating process. Heuristic...
See More
Control Valve Problems
20 min
Intermediate
Article / Blog
Application
Control valve problems can severely affect control loop performance and, unless eliminated, they can make controller tuning a challenging (sometimes impossible) task. Some problems are quite...
See More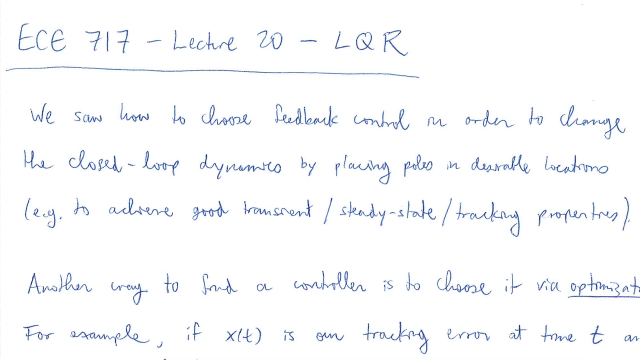
The Linear Quadratic Regulator (LQR)
Intermediate
Article / Blog
Theory
Lecture notes for ECE717 on LQR control by Laurent Lessard. There is a section that shows how the Algebraic Riccati Equation is part of the LQR solution by "completing the square".
See More
MATLAB Documentation page: idLinear mapping object
Intermediate
Article / Blog
Application
This is the Mathworks documentation page for the idLinear mapping object.
See More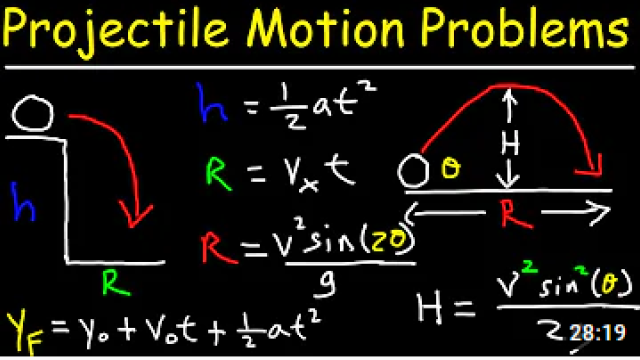
Projectile Motion Practice Problems
28 min
Intermediate
Video
Application
In this video, practice along questions on an important topic of Kinematics i.e Projectile Motion. Practicing would help you remember the concepts and also understand them better.
See More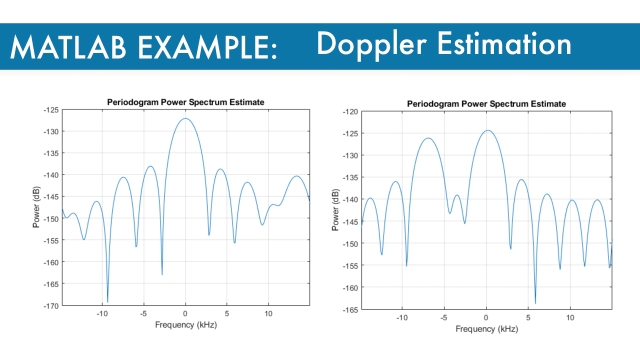
MATLAB Example: Doppler Estimation
Intermediate
Example
Application
This example shows a monostatic pulse radar detecting the radial velocity of moving targets at specific ranges. The speed is derived from the Doppler shift caused by the moving targets. We...
See More
Wind Tunnel Testing: Introduction and Data Acquisition
28 min
Intermediate
Video
Theory
This is the first of our 3 part series on wind tunnel testing. In this video, we introduce the concept of wind tunnel testing as well as discuss the process for acquiring aerodynamic data in...
See More
Model-Based Reinforcement Learning: Theory and Practice
Intermediate
Article / Blog
Theory
Blog post by Michael Janner of Berkeley Artificial Intelligence Research on model-based reinforcement learning.
See More
Feedforward tuning rules for measurable disturbances with PID control: a tut...
Intermediate
Peer Reviewed Paper
Theory
Feedforward control can be considered as the most well-known control approach to deal with measurable disturbances. It started to be used almost 100 years ago, and since then it is being...
See More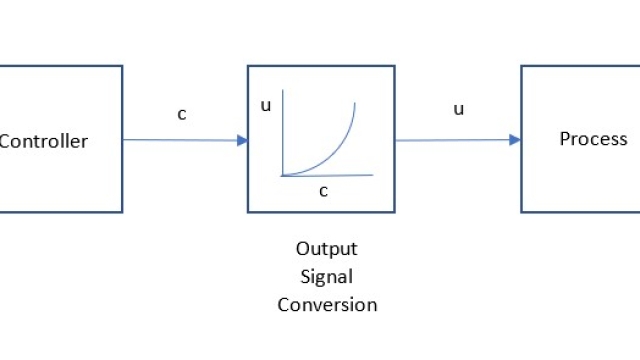
Nonlinear Control Output Signal Characterization
15 min
Intermediate
Article / Blog
Application
If the process gain makes large changes over the operating range, then tuning PID (or other linear) controllers is difficult. If tuned for one region, the controller is undesirably sluggish...
See More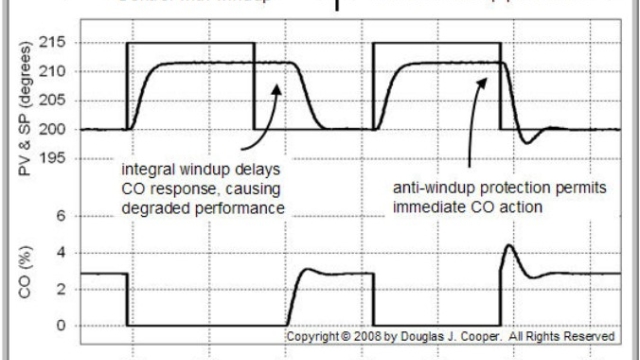
Integral Wind-Up and Solution
Intermediate
Article / Blog
Application
What is integral wind-up and how velocity mode solves it.
See More
Train Custom LQR Agent with MATLAB
Intermediate
Example
Application
This example shows how to train a custom linear quadratic regulation (LQR) agent to control a discrete-time linear system modeled in MATLAB®.
See More
Linear Model Identification Basics
Intermediate
Article / Blog
Application
This is a curated list of Mathworks products, examples, and topics that cover identifying linear models, selecting suitable model structures, constructing and modifying model object...
See More")
Koopman Spectral Analysis (Continuous Spectrum)
12 min
Intermediate
Video
Theory
In this video, we discuss how to use Koopman theory for dynamical systems with a continuous eigenvalue spectrum. These systems are quite common, such as a pendulum, where the period...
See More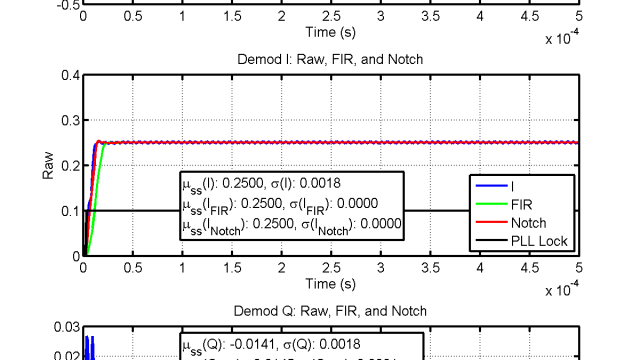
The Demod Squad: A Tutorial on the Utility and Methodologies for Using Modul...
60 min
Intermediate
Peer Reviewed Paper
Theory
This paper is a brief tutorial on methods for using modulated signals in feedback loops, and especially of the different methods and trade offs used for demodulating those signals to get...
See More![Principal Component Analysis (PCA) 1 [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/hqdefault_23.jpg?itok=ugDPjF_z "Principal Component Analysis (PCA) 1 [Python]")
Principal Component Analysis (PCA) 1 [Python]
7 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used for principal component analysis (PCA) in Python (part 1).
See More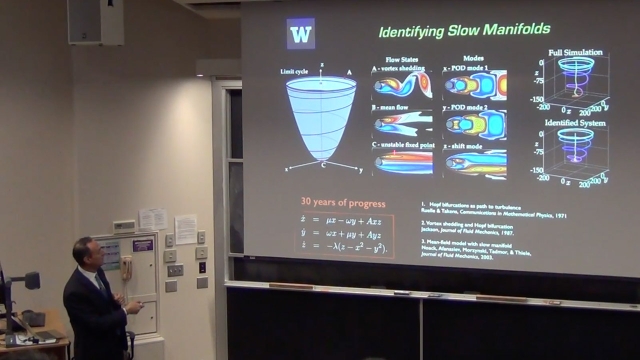
Nathan Kutz:"Data-driven Discovery of Governing Physical Laws"
73 min
Intermediate
Video
Theory
Seminar by Dr.Nathan Kutz on "Data-driven Discovery of Governing Physical Laws" on 10/31/2018 CICS Seminar Series
See More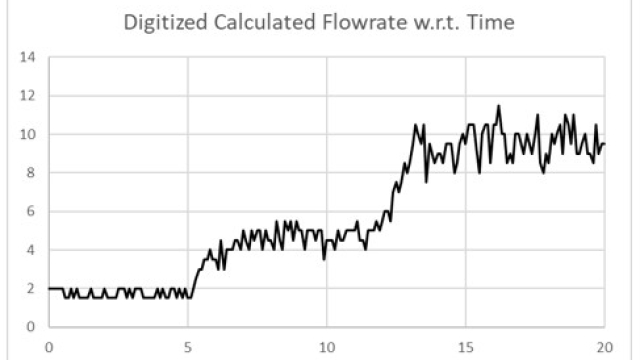
Measurements, Transmission Signals, and Issues
45 min
Intermediate
Article / Blog
Application
This is an introduction to scaled information transmission signals (for example 4-20 mA, 3-15 psig, etc.), the actual sensed signals (like using orifice dP to infer flow rate, or temperature...
See More
Kristin Pettersen Lectures on Nonlinear Control
300 min
Intermediate
Video
Theory
Kristin Pettersen Lectures on Nonlinear Control, including many of the necessary mathematical tools and concepts.
See More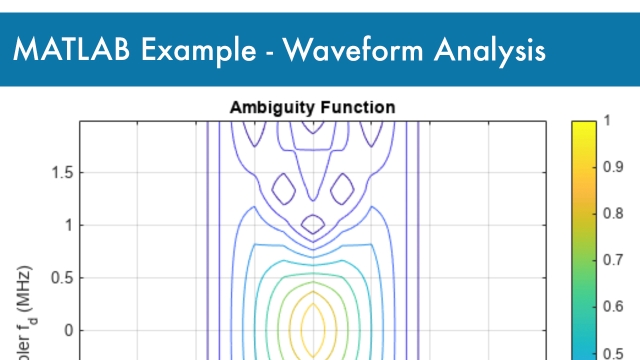
MATLAB Example: Waveform Analysis Using the Ambiguity Function
Intermediate
Example
Application
This example shows how to use the ambiguity function to analyze waveforms. It compares range and Doppler capabilities of several common pulsed waveforms such as the rectangular waveform, the...
See More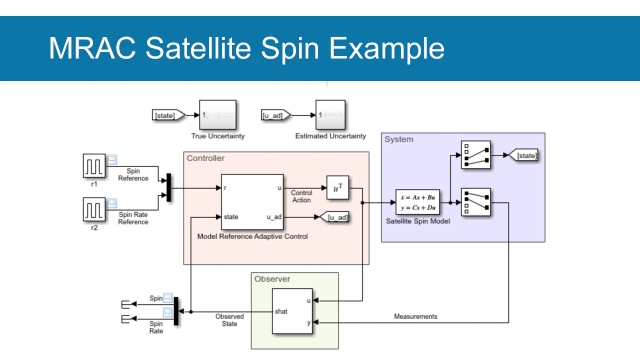
Model Reference Adaptive Control of Satellite Spin
Intermediate
Project
Theory
This example shows how to control satellite spin using model reference adaptive control (MRAC) to make the unknown controlled system match an ideal reference model. The satellite system is...
See More
Geodetic Coordinates: Computing Latitude and Longitude
31 min
Intermediate
Video
Theory
In this video we show how to compute the geodetic latitude and terrestrial longitude if given the velocity north and east. This is useful for simulating a body moving over a spheroid Earth...
See More