

Kalman Filter Design
30 min
Intermediate
Article / Blog
Application
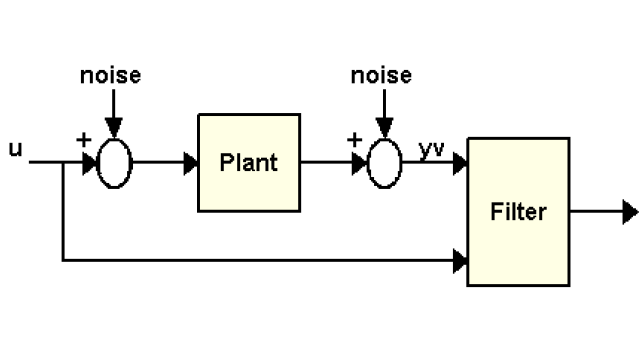
This example shows how to perform Kalman filtering. Both a steady state filter and a time varying filter are designed and simulated.
See More
Introducing Feedback Control to Middle and High School STEM Students, Part 2...
60 min
Intermediate
Article / Blog
Demonstration
This paper was presented at the 2019 IFAC Advances on Control Education Conference (IFAC-ACE), Philadelphia, PA, USA, July 7-9, 2019, and is in the conference proceedings. This paper aims at...
See More
Introducing Feedback Control to Middle and High School STEM Students, Part 1...
60 min
Intermediate
Article / Blog
Demonstration
This paper was presented at the 2019 IFAC Advances on Control Education Conference (IFAC-ACE), Philadelphia, PA, USA, July 7-9, 2019, and is in the conference proceedings. This paper aims at...
See More
Discrete Fourier Transform
Intermediate
Article / Blog
Theory
The discrete Fourier transform, or DFT, is the primary tool of digital signal processing. The foundation of the product is the fast Fourier transform (FFT), a method for computing the DFT...
See More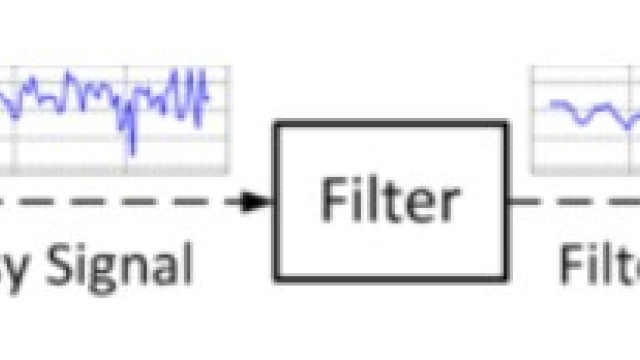
Introduction to Noise Filtering
20 min
Intermediate
Article / Blog
Application
Introduction to filtering - moving average, first-order, anti-aliasing, set point softening
See More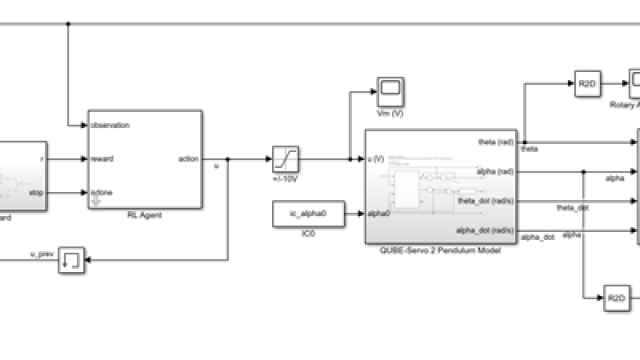
Using the Reinforcement Learning Toolbox™ to Balance an Inverted Pendulum
30 min
Intermediate
Article / Blog
Application
Reinforcement learning (RL) is a subset of Machine Learning that uses dynamic data, not static data like unsupervised learning or supervised learning. Reinforcement learning is used in many...
See More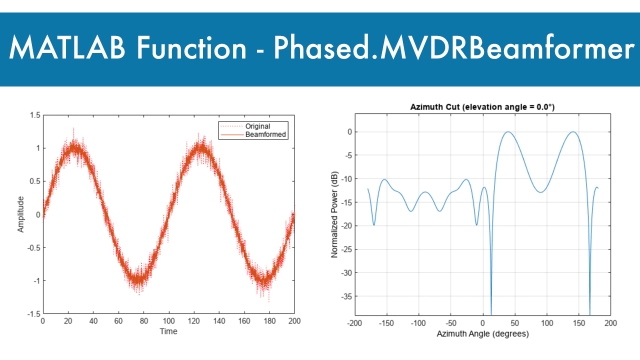
MATLAB Function: phased.MVDRBeamformer
Intermediate
Article / Blog
Application
The phased.MVDRBeamformer System object™ implements a narrowband minimum-variance distortionless-response (MVDR) beamformer. The MVDR beamformer is also called the Capon beamformer. An MVDR...
See More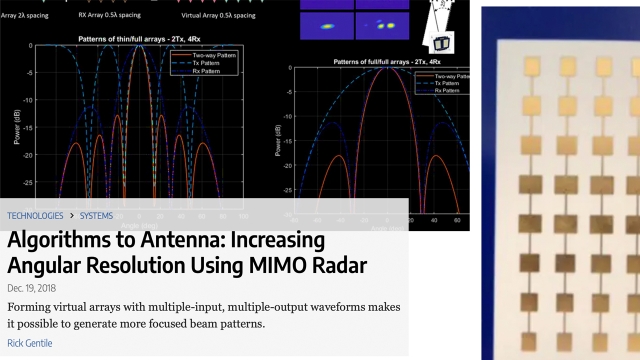
Algorithms to Antenna: Increasing Angular Resolution Using MIMO Radar
Intermediate
Article / Blog
Theory
Articles in Microwaves & RF that talks about how forming virtual arrays with multiple-input, multiple-output waveforms makes it possible to generate more focused beam patterns.
See More
Road Sign Detection using Transfer Learning on RetinaNet
15 min
Intermediate
Article / Blog
Application
This blog outlines a number of open-source resources for transfer learning that are worthy of exploring, ands show the result of using transfer learning on RetinaNet to develop a road sign...
See More
MIMO Radar: TI Application Report
Intermediate
Article / Blog
Theory
MIMO radar is a key technology in improving the angle resolution (spatial resolution) of mmwave-radars. This article introduces the basic principles of the MIMO-radar and the different...
See More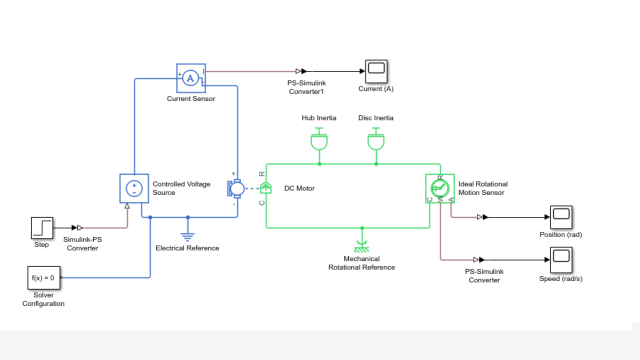
Using Simscape™ to Model a Quanser QUBE-Servo 2 with Friction
15 min
Intermediate
Article / Blog
Theory
Modelling a DC servomotor is one of the common examples used in control system textbooks and courses. Given that so many systems use DC motors, e.g. robot manipulator arms, it’s an important...
See More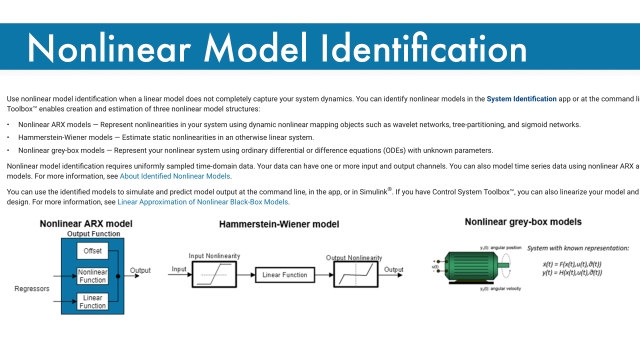
Nonlinear Model Identification
Intermediate
Article / Blog
Application
Mathwork overview page describing nonlinear model identification. Use nonlinear model identification when a linear model does not completely capture your system dynamics. You can identify...
See More
TCLab PID Control
60 min
Intermediate
Article / Blog
Application
Implement a PID controller on the Temperature Control Lab hardware to drive the temperature from room temperature to 60 degrees C. This resource lets you attempt the design yourself first...
See More
Thoughts on Furthering the Control Education of Practicing Engineers
60 min
Intermediate
Article / Blog
Demonstration
This paper was presented at the 2019 IFAC Advances on Control Education Conference (IFAC-ACE), Philadelphia, PA, USA, July 7-9, 2019, and is in the conference proceedings. This paper aims to...
See More
MATLAB Command: goodnessOfFit
Intermediate
Article / Blog
Application
Goodness of fit between test and reference data for analysis and validation of identified models
See More
Tuning PID Controllers
20 min
Intermediate
Article / Blog
Application
Tuning controllers is the procedure for choosing the coefficient values for the P, I and D modes. It must be simple to execute, fast, and non-disruptive to the operating process. Heuristic...
See More
Decoding a Laplace Representation of a Controller
20 min
Intermediate
Article / Blog
Application
A how to relate the Laplace notation to the PID controller variation and features
See More
Cascade Control
15 min
Intermediate
Article / Blog
Application
When and how to use Cascade Control
See More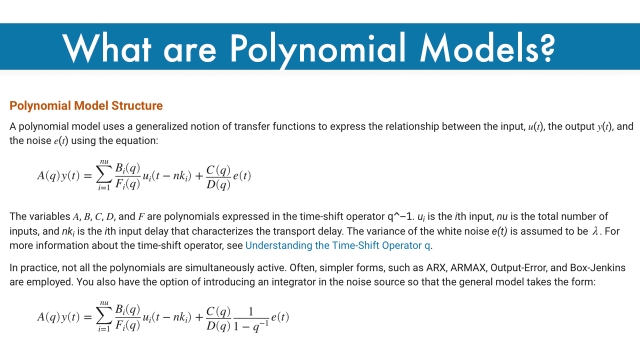
What are Polynomial Models?
Intermediate
Article / Blog
Theory
This Mathworks page provides an overview of polynomial models.
See More
PID Controller Variations
20 min
Intermediate
Article / Blog
Application
It is important to understand the variations on the PID algorithm when tuning and when choosing a version that is consistent within your use context. Unfortunately, there are many names for...
See More
Gain Scheduling (Pre-programmed Controller Parameter Adjustment)
Intermediate
Article / Blog
Application
Process gain and time-constants change with operating flow rate, tank levels, temperatures, etc. This often requires re-tuning of the controller coefficient values. However, once done...
See More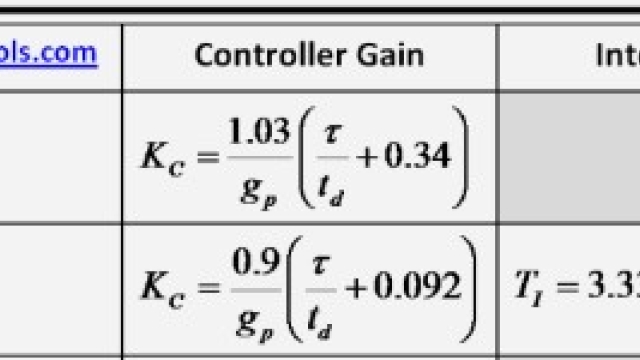
Cohen-Coon Tuning
15 min
Intermediate
Article / Blog
Application
A procedure and commentary on this tuning approach that includes deadtime.
See More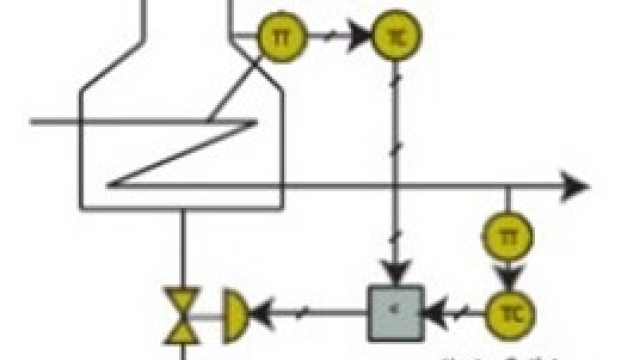
Override and Reset Feedback
15 min
Intermediate
Article / Blog
Application
Override controllers are for safety or switching to auxiliary variables. The non-selected controller needs to prevent becoming wound up.
See More
Adaptive Control (Part I) — Hypersonics and the MIT Rule
Intermediate
Article / Blog
Theory
This blog post introduces the algorithm that ruled the adaptive flight control system of the first manned hypersonic aircraft, the North American X-15.
See More
MATLAB Command: resid
Intermediate
Article / Blog
Application
This MATLAB command is part of the system identification toolbox and provides a way to compute and test residuals.
See More