

Feedforward tuning rules for measurable disturbances with PID control: a tut...
Intermediate
Peer Reviewed Paper
Theory
Feedforward control can be considered as the most well-known control approach to deal with measurable disturbances. It started to be used almost 100 years ago, and since then it is being...
See More
System Identification: Regression Models
5 min
Intermediate
Video
Theory
This lecture provides an overview of modern data-driven regression methods for linear and nonlinear system identification, based on the dynamic mode decomposition (DMD), Koopman theory, and...
See More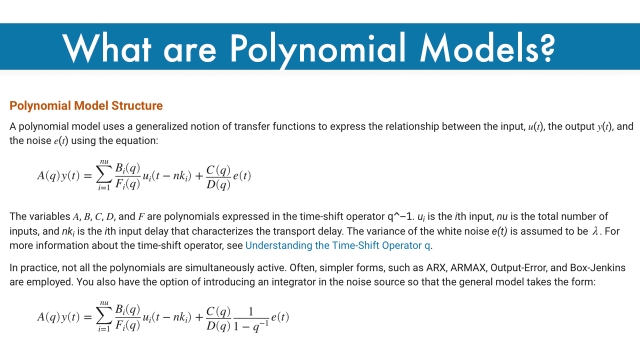
What are Polynomial Models?
Intermediate
Article / Blog
Theory
This Mathworks page provides an overview of polynomial models.
See More
A Tutorial on PES Pareto Methods for Analysis of Noise Propagation in Feedba...
48 min
Intermediate
Video
Theory
This is the recorded talk of the paper by the same title.
See More
Understanding P, I, and D
30 min
Intermediate
Article / Blog
Theory
Understanding what the proportional, integral, and derivative terms do within the PID controller is essential to choose appropriate action, trouble shoot controllers, chose appropriate...
See More
Android and iPhone E-Learning App for Nyquist Stability Criterion
Intermediate
App
Theory
In our Nyquist App, you can analyze the stability of the closed loop by using the Nyquist stability criterion. With the Nyquist stability criterion, you can determine the stability of the...
See More
Wind Tunnel Testing: Introduction and Data Acquisition
28 min
Intermediate
Video
Theory
This is the first of our 3 part series on wind tunnel testing. In this video, we introduce the concept of wind tunnel testing as well as discuss the process for acquiring aerodynamic data in...
See More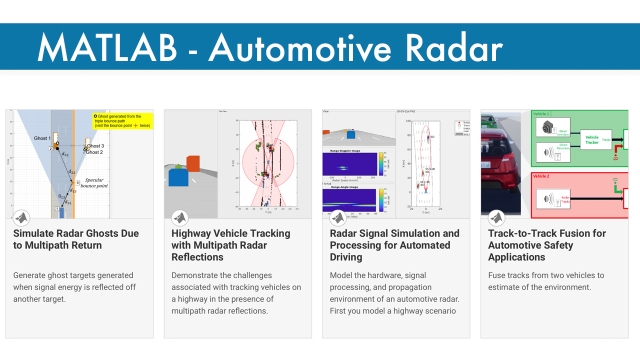
Automotive Radar MATLAB Documentation and Examples
Intermediate
Article / Blog
Theory
MATLAB documentation and examples for probabilistic and physics-based radar sensor models, simulation of MIMO antennas, waveforms, I/Q radar signals, micro-Doppler signatures, detections...
See More
Dealing with Non-Stationarity in Multi-Agent Deep Reinforcement Learning
Intermediate
Peer Reviewed Paper
Theory
From the abstract
Recent developments in deep reinforcement learning are concerned with creating decision-making agents which can perform well in various complex domains. A particular...
See More
The Linear Quadratic Regulator (LQR)
Intermediate
Article / Blog
Theory
Lecture notes for ECE717 on LQR control by Laurent Lessard. There is a section that shows how the Algebraic Riccati Equation is part of the LQR solution by "completing the square".
See More
Adaptive Control (Part II) —Modeling the X-15’s Adaptive Flight Control Syst...
Intermediate
Article / Blog
Theory
This blog post shows how to build from scratch a Simulink model of the famous MH-96, the X-15's Adaptive Flight Control System
See More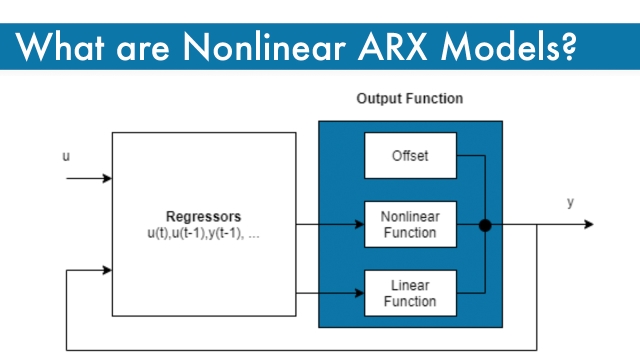
What are Nonlinear ARX Models?
Intermediate
Article / Blog
Theory
This Mathworks page provides an overview of Nonlinear ARX Models.Nonlinear ARX models extend the linear ARX models to the nonlinear case. The structure of these models enables you to model...
See More
Advanced process control (APC): Theory & Applications in SAGD
Intermediate
Video
Theory
This webinar is presented by Thiago Avila and covers what APC is, why we do it, examples of APC in the SAGD industry, what optimization opportunities are available, and where this technology...
See More
Wind Tunnel Data Analysis and Testing Considerations
111 min
Intermediate
Video
Theory
This is the last video in our 3 part series on wind tunnel testing. In this video, we discuss what typical plots of wind tunnel data might look like and how to extract relevant information...
See More
Multi-agent reinforcement learning: An overview
Intermediate
Peer Reviewed Paper
Theory
From the abstract:
Multi-agent systems can be used to address problems in a variety of do- mains, including robotics, distributed control, telecommunications, and economics. The complexity...
See More
Adaptive Control (Part I) — Hypersonics and the MIT Rule
Intermediate
Article / Blog
Theory
This blog post introduces the algorithm that ruled the adaptive flight control system of the first manned hypersonic aircraft, the North American X-15.
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 10 - Policy G...
81 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

Smart Projectile State Estimation Using Evidence Theory
Intermediate
Peer Reviewed Paper
Theory
This journal article provides a very good practical understanding of Dempster-Shafer theory using sensor fusion and state estimation as the backdrop.
See More
The Navigation Equations: Computing Position North, East, and Down
52 min
Intermediate
Video
Theory
In this video we show how to compute the inertial velocity of a rigid body in the vehicle-carried North, East, Down (NED) frame. This is achieved by rotating the velocity expressed in the...
See More
Data-Driven Control: Change of Variables in Control Systems (Correction)
2 min
Intermediate
Video
Theory
This video corrects a typo in the previous lecture.
See More")
Koopman Spectral Analysis (Multiscale systems)
5 min
Intermediate
Video
Theory
In this video, we discuss recent applications of data-driven Koopman theory to multi-scale systems.
See More
Randomized SVD: Power Iterations and Oversampling
4 min
Intermediate
Video
Theory
This video discusses the randomized SVD and how to make it more accurate with power iterations (multiple passes through the data matrix) and oversampling.
See More
RL Course by David Silver - Lecture 1: Introduction to Reinforcement Learnin...
88 min
Intermediate
Video
Theory
Introduces reinforcment learning (RL), an overview of agents and some classic RL problems.
See More
Manipulating Aerodynamic Coefficients
25 min
Intermediate
Video
Theory
In this video we discuss some potential problems you may encounter when attempting to perform operations with dimensionless aerodynamic coefficients such as CL and CD.
See More
Data-Driven Control: Observer Kalman Filter Identification
12 min
Intermediate
Video
Theory
In this lecture, we introduce the observer Kalman filter identification (OKID) algorithm. OKID takes natural input--output data from a system and estimates the impulse response, for later...
See More