

Manuscript about ITISE: an Interactive Software Tool for System Identificati...
Intermediate
Peer Reviewed Paper
Theory
The paper describes the conceptual basis, main features and functionality of an interactive software tool developed in support of system identification education and discovery.
This...
See More
Full Stack Deep Learning
Intermediate
Course
Theory
There are many great courses to learn how to train deep neural networks. However, training the model is just one part of shipping a deep learning project. This course teaches full-stack...
See More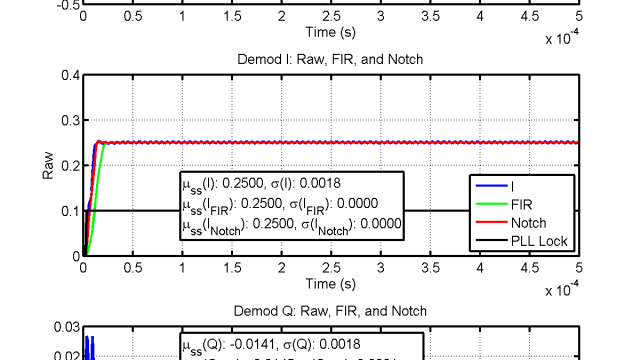
The Demod Squad: A Tutorial on the Utility and Methodologies for Using Modul...
47 min
Intermediate
Video
Theory
Video talk of the paper by the same name.
See More")
Koopman Spectral Analysis (Continuous Spectrum)
12 min
Intermediate
Video
Theory
In this video, we discuss how to use Koopman theory for dynamical systems with a continuous eigenvalue spectrum. These systems are quite common, such as a pendulum, where the period...
See More
System Identification: DMD Control Example
8 min
Intermediate
Video
Theory
This lecture gives a Matlab example of dynamic mode decomposition with control (DMDc) for full-state system identification.
See More
Averaging and Vibrational Control of Mechanical Systems
Intermediate
Peer Reviewed Paper
Theory
Abstract. This paper investigates averaging theory and oscillatory control for a large class of mechanical systems. A link between averaging and controllability theory is presented by...
See More
Yann LeCun’s Deep Learning Course at CDS
Intermediate
Course
Theory
This course concerns the latest techniques in deep learning and representation learning, focusing on supervised and unsupervised deep learning, embedding methods, metric learning...
See More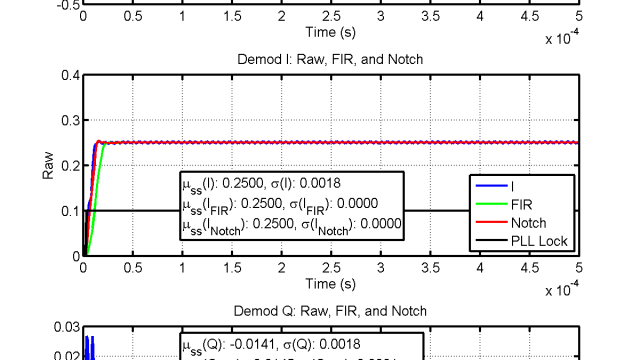
The Demod Squad: A Tutorial on the Utility and Methodologies for Using Modul...
60 min
Intermediate
Peer Reviewed Paper
Theory
This paper is a brief tutorial on methods for using modulated signals in feedback loops, and especially of the different methods and trade offs used for demodulating those signals to get...
See More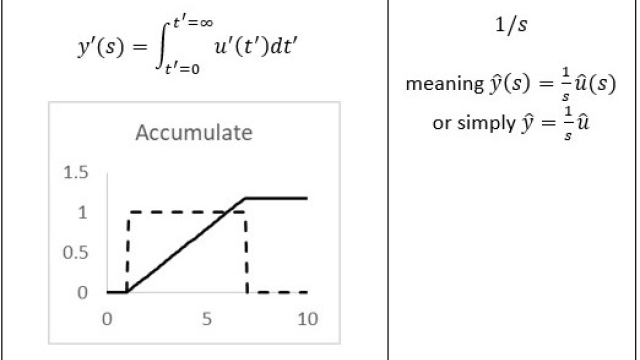
No! Not Laplace Transforms
60 min
Intermediate
Course
Theory
In my 13-year industrial career, I never used Laplace transforms. However, transfer functions and block diagram notation are efficient methods to describe dynamic behaviors, and are often...
See More
3D Kinematics, Free Falling, Reference Frames
53 min
Intermediate
Video
Theory
Walter Lewin is one of the most reputed professors and was a former lecturer at MIT. His free to watch series on YouTube titled 8.01 is an excellent one for undergrads and high school...
See More
Model-Based Reinforcement Learning: Theory and Practice
Intermediate
Article / Blog
Theory
Blog post by Michael Janner of Berkeley Artificial Intelligence Research on model-based reinforcement learning.
See More
Why the Riccati Equation Is important for LQR Control
14 min
Intermediate
Video
Theory
This Tech Talk looks at an optimal controller called linear quadratic regulator, or LQR, and shows why the Riccati equation plays such an important role in solving it efficiently. The talk...
See More
How Antennas Work
8 min
Intermediate
Video
Theory
Antennas constitute as a major component in various communication systems, signal transmission and many others. It is important to understand how they work and create propagating waves in...
See More
Feedforward tuning rules for measurable disturbances with PID control: a tut...
Intermediate
Peer Reviewed Paper
Theory
Feedforward control can be considered as the most well-known control approach to deal with measurable disturbances. It started to be used almost 100 years ago, and since then it is being...
See More
System Identification: Regression Models
5 min
Intermediate
Video
Theory
This lecture provides an overview of modern data-driven regression methods for linear and nonlinear system identification, based on the dynamic mode decomposition (DMD), Koopman theory, and...
See More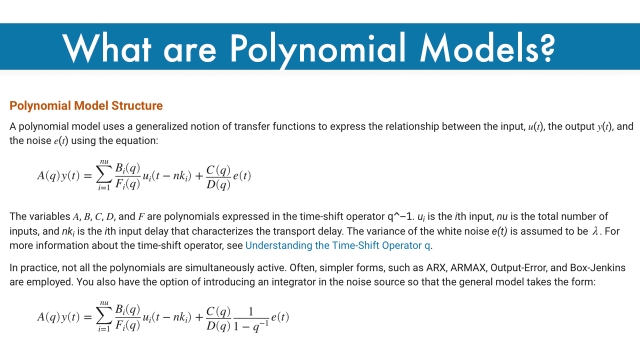
What are Polynomial Models?
Intermediate
Article / Blog
Theory
This Mathworks page provides an overview of polynomial models.
See More
A Tutorial on PES Pareto Methods for Analysis of Noise Propagation in Feedba...
48 min
Intermediate
Video
Theory
This is the recorded talk of the paper by the same title.
See More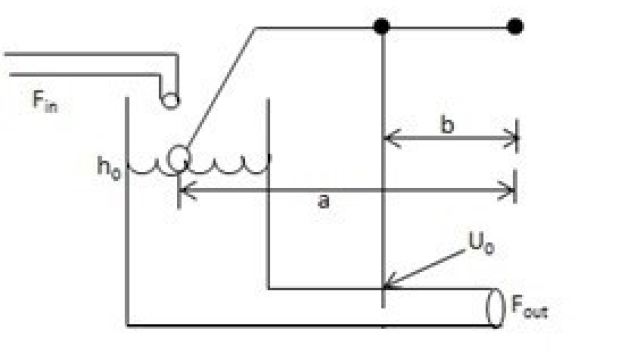
Understanding P, I, and D
30 min
Intermediate
Article / Blog
Theory
Understanding what the proportional, integral, and derivative terms do within the PID controller is essential to choose appropriate action, trouble shoot controllers, chose appropriate...
See More
Android and iPhone E-Learning App for Nyquist Stability Criterion
Intermediate
App
Theory
In our Nyquist App, you can analyze the stability of the closed loop by using the Nyquist stability criterion. With the Nyquist stability criterion, you can determine the stability of the...
See More
Wind Tunnel Testing: Introduction and Data Acquisition
28 min
Intermediate
Video
Theory
This is the first of our 3 part series on wind tunnel testing. In this video, we introduce the concept of wind tunnel testing as well as discuss the process for acquiring aerodynamic data in...
See More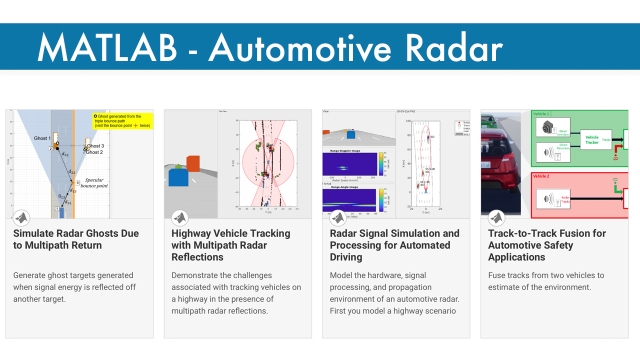
Automotive Radar MATLAB Documentation and Examples
Intermediate
Article / Blog
Theory
MATLAB documentation and examples for probabilistic and physics-based radar sensor models, simulation of MIMO antennas, waveforms, I/Q radar signals, micro-Doppler signatures, detections...
See More
Dealing with Non-Stationarity in Multi-Agent Deep Reinforcement Learning
Intermediate
Peer Reviewed Paper
Theory
From the abstract
Recent developments in deep reinforcement learning are concerned with creating decision-making agents which can perform well in various complex domains. A particular...
See More
The Linear Quadratic Regulator (LQR)
Intermediate
Article / Blog
Theory
Lecture notes for ECE717 on LQR control by Laurent Lessard. There is a section that shows how the Algebraic Riccati Equation is part of the LQR solution by "completing the square".
See More
Adaptive Control (Part II) —Modeling the X-15’s Adaptive Flight Control Syst...
Intermediate
Article / Blog
Theory
This blog post shows how to build from scratch a Simulink model of the famous MH-96, the X-15's Adaptive Flight Control System
See More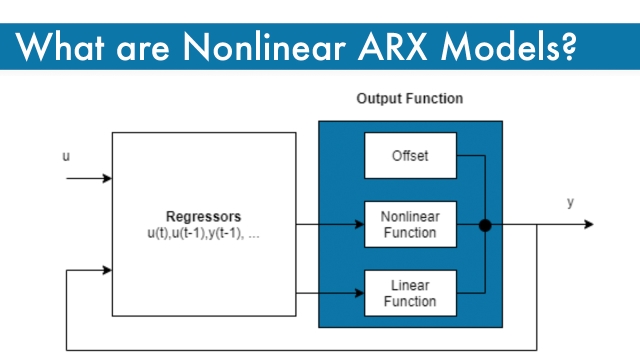
What are Nonlinear ARX Models?
Intermediate
Article / Blog
Theory
This Mathworks page provides an overview of Nonlinear ARX Models.Nonlinear ARX models extend the linear ARX models to the nonlinear case. The structure of these models enables you to model...
See More