

Linear Algebra Review
Intermediate
Course
Theory
This short course is a quick review of linear algebra, intended for students who have already taken a previous course in linear algebra or have some experience with vectors and matrices. The...
See More
Discrete Fourier Transform
Intermediate
Article / Blog
Theory
The discrete Fourier transform, or DFT, is the primary tool of digital signal processing. The foundation of the product is the fast Fourier transform (FFT), a method for computing the DFT...
See More
Z-Transform - Practical Applications
26 min
Intermediate
Video
Application
Covering practical applications of the Z-transform used in digital signal processing, for example, stability analysis and frequency response of discrete-time systems. Theory, C code, and...
See More
Interactive Tool for PID understanding
Intermediate
App
Application
The module PID Basics is designed to explore the properties of a simple feedback loop by showing the time and frequency responses of a closed-loop system and demonstrating how these...
See More
TinyEKF: Lightweight C/C++ Extended Kalman Filter with Python for prototypin...
Intermediate
Software
Application
TinyEKF is a simple C/C++ implementation of the Extended Kalman Filter that is general enough to use on different projects. In order to make it practical for running on Arduino, STM32, and...
See More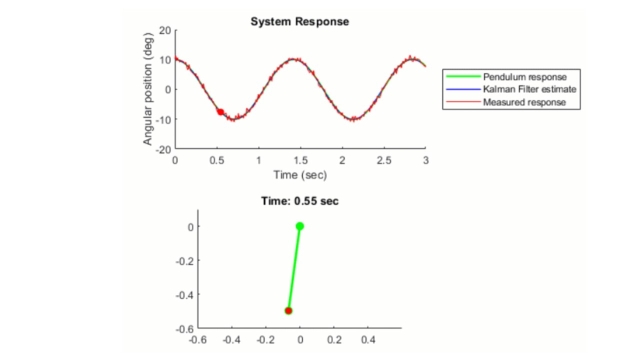
Kalman Filter Virtual Lab
Intermediate
Virtual Lab
Application
The Kalman Filter virtual laboratory contains interactive exercises that let you study linear and extended Kalman filter design for state estimation of a simple pendulum system. The virtual...
See More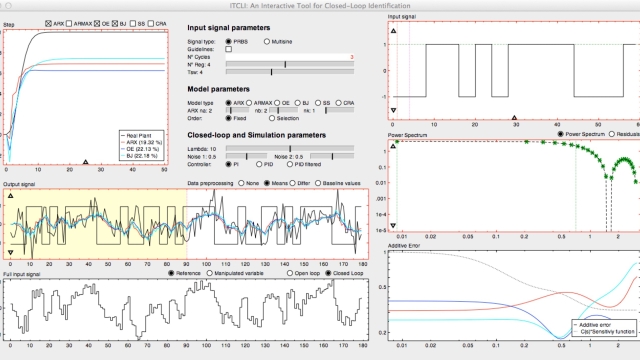
ITCLI: An Interactive Tool for Closed-Loop Identification
Intermediate
App
Application
The Interactive Tool for Closed-Loop Identification (ITCLI) is an interactive software tool for understanding SISO closed-loop identification using prediction-error techniques. The tool...
See More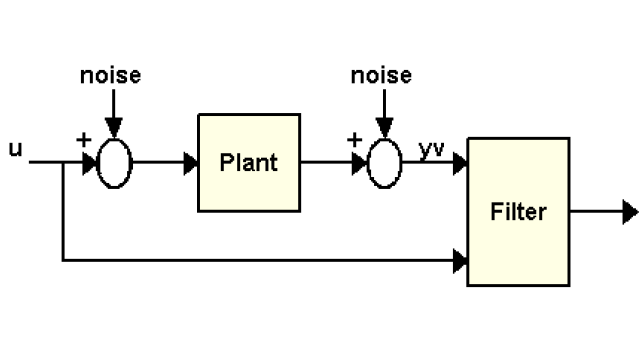
Kalman Filter Design
30 min
Intermediate
Article / Blog
Application
This example shows how to perform Kalman filtering. Both a steady state filter and a time varying filter are designed and simulated.
See More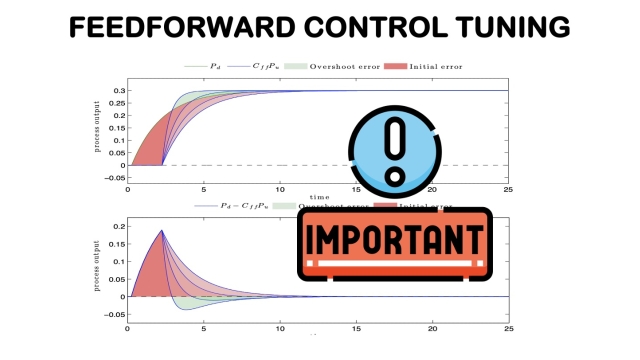
Advances in feedforward control for measurable disturbances
35 min
Intermediate
Video
Theory
The efficient compensation of load disturbances is one of the most important tasks in any control system. Most industrial processes are affected by disturbances and only feedback is commonly...
See More
Introduction to Noise Filtering
20 min
Intermediate
Article / Blog
Application
Introduction to filtering - moving average, first-order, anti-aliasing, set point softening
See More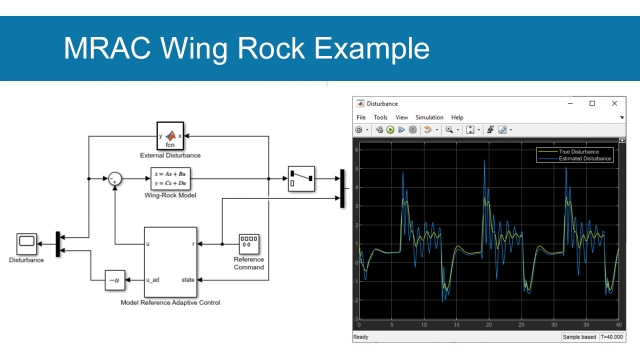
Model Reference Adaptive Control of Aircraft Undergoing Wing Rock
Intermediate
Project
Theory
This example shows how to control roll and roll rate of a delta wing aircraft undergoing wing rock. For this example, the system model is unknown. Therefore, you use model reference adaptive...
See More
Guaranteed Margins for LQR Regulators
10 min
Intermediate
Peer Reviewed Paper
Theory
John Doyle's famous paper! He presents a counterexample that shows that are no guaranteed margins for LQG systems.
See More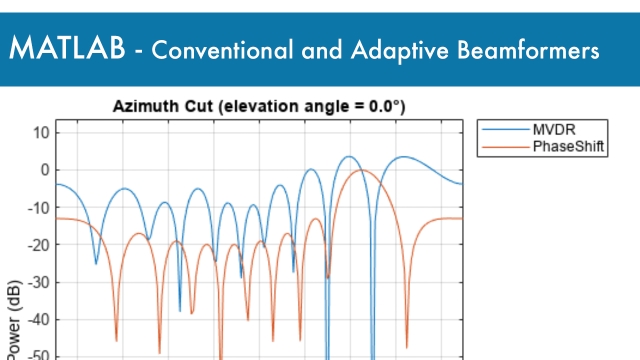
Conventional and Adaptive Beamformers
Intermediate
Example
Application
This example illustrates how to apply digital beamforming to a narrowband signal received by an antenna array. Three beamforming algorithms are illustrated: the phase shift beamformer...
See More
Road Sign Detection using Transfer Learning on RetinaNet
15 min
Intermediate
Article / Blog
Application
This blog outlines a number of open-source resources for transfer learning that are worthy of exploring, ands show the result of using transfer learning on RetinaNet to develop a road sign...
See More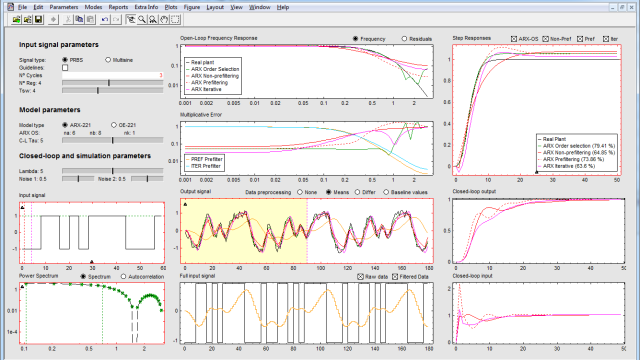
ITCRI: An Interactive Software Tool for Control-Relevant Identification
Intermediate
App
Application
The Interactive Tool for Control Relevant Identification (ITCRI) comprehensively captures the control-relevant identification process, from input design to closed-loop control, depicting...
See More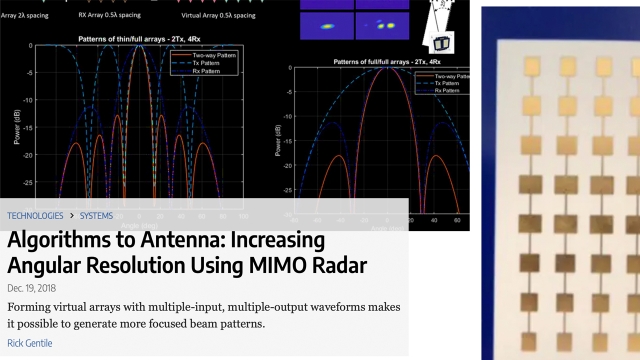
Algorithms to Antenna: Increasing Angular Resolution Using MIMO Radar
Intermediate
Article / Blog
Theory
Articles in Microwaves & RF that talks about how forming virtual arrays with multiple-input, multiple-output waveforms makes it possible to generate more focused beam patterns.
See More
System Identification: Koopman with Control
10 min
Intermediate
Video
Theory
This lecture provides an overview of the use of modern Koopman spectral theory for nonlinear control. In particular, we develop control in a coordinate system defined by eigenfunctions of...
See More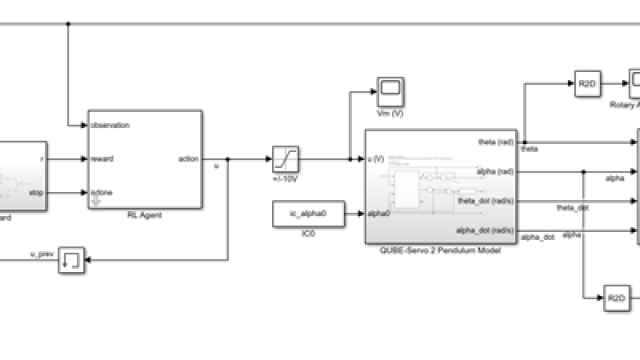
Using the Reinforcement Learning Toolbox™ to Balance an Inverted Pendulum
30 min
Intermediate
Article / Blog
Application
Reinforcement learning (RL) is a subset of Machine Learning that uses dynamic data, not static data like unsupervised learning or supervised learning. Reinforcement learning is used in many...
See More
Advances in feedforward control for measurable disturbances (in Spanish)
60 min
Intermediate
Video
Theory
The efficient compensation of load disturbances is one of the most important tasks in any control system. Most industrial processes are affected by disturbances and only feedback is commonly...
See More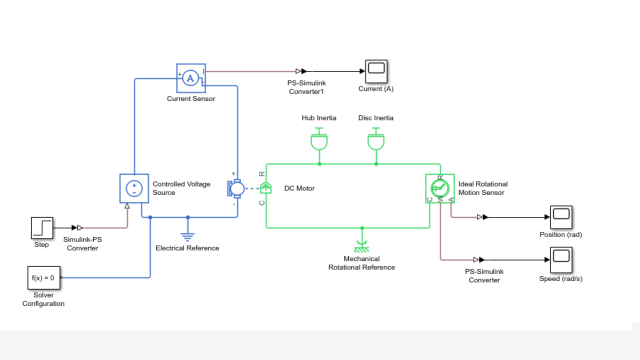
Using Simscape™ to Model a Quanser QUBE-Servo 2 with Friction
15 min
Intermediate
Article / Blog
Theory
Modelling a DC servomotor is one of the common examples used in control system textbooks and courses. Given that so many systems use DC motors, e.g. robot manipulator arms, it’s an important...
See More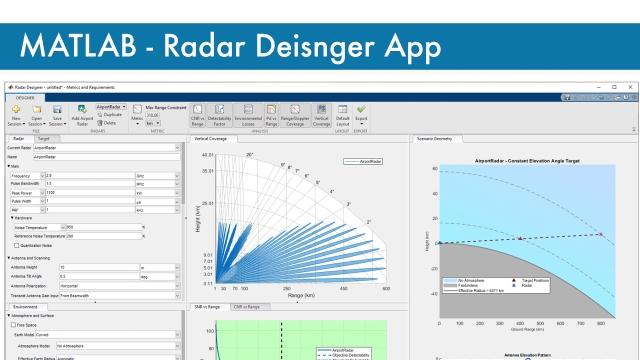
Matlab Radar Designer App
Intermediate
App
Application
The Radar Designer app is an interactive tool that assists engineers and system analysts with high-level design and assessment of radar systems at the early stage of radar development. Using...
See More
Model predictive control python toolbox
Intermediate
Software
Application
do-mpc is a comprehensive open-source toolbox for robust model predictive control (MPC) and moving horizon estimation (MHE). do-mpc enables the efficient formulation and solution of control...
See More
Perspectives on Control-Relevant Identification Through the Use of Interacti...
Intermediate
Peer Reviewed Paper
Theory
This paper presents a control-relevant identification methodology through an intuitive interactive tool called "Interactive Tool for Control Relevant Identification (ITCRI)". ITCRI...
See More
MIMO Radar: TI Application Report
Intermediate
Article / Blog
Theory
MIMO radar is a key technology in improving the angle resolution (spatial resolution) of mmwave-radars. This article introduces the basic principles of the MIMO-radar and the different...
See More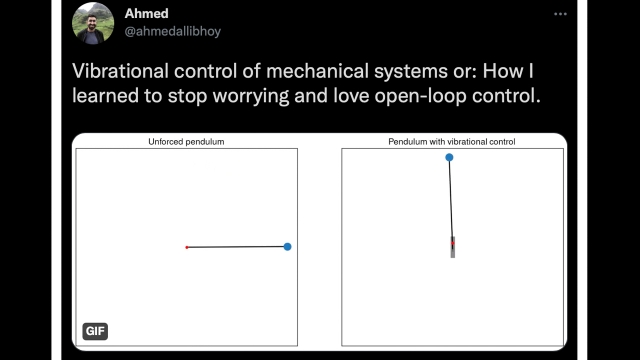
Twitter Thread: Vibrational control of mechanical systems
Intermediate
Social Media
Application
This Twitter thread by @ahmedallibhoy walks through an explanation of controlling an inverted pendulum with an open-loop vibrational controller.
See More