


Minami's Control School (Japanese)
Beginner
Video
Theory
教員のみなみゆうきです.専門は制御工学です.制御工学は「モノの動きをデザインする科学」です.制御工学を勉強したいという方に,僕の知識をすこしでも届けられると良いなと思い,YouTubeをやっています.
2019年の秋,講義ノートの作成の様子を撮影し,YouTubeに動画をアップロードしたのを契機として,動画作成をはじめました...
See More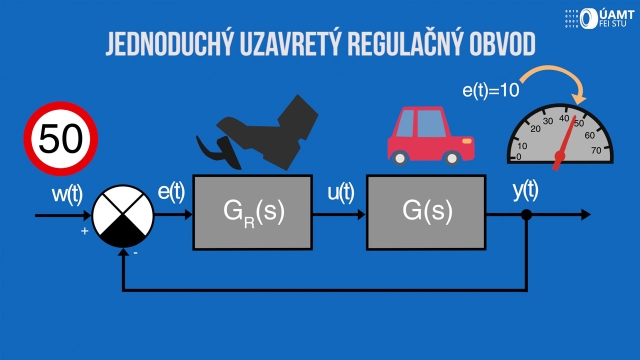
Základy automatizácie a teórie systémov – videokurz (Slovak)
Beginner
Article / Blog
Theory
Pozrite si videokurz zo základov teórie systémov a automatizácie. Náš kurz má 7 lekcií.
See More
Reinforcement Learning: An Introduction
Beginner
Book
Theory
From the book introduction:
The idea that we learn by interacting with our environment is probably the first to occur to us when we think about the nature of learning. When an infant plays...
See More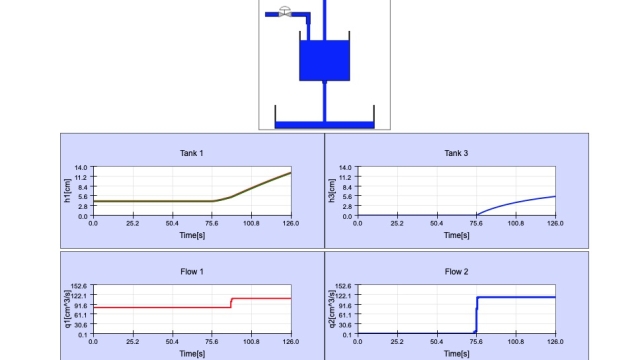
Virtual Lab for a Two-tanks system
Beginner
Virtual Lab
Application
This is a virtual lab for a two-tank system that can be used for modelling and control learing/teaching purposes. Open-loop tests and closed-loop simulatons based on PI control or PI plus...
See More
Process Control is Inventory Control
10 min
Beginner
Article / Blog
Application
You change the inventory of heat to change temperature. You change the inventory of material to change level. Understanding how the inventory relates to the controlled variable is...
See More
Autonomous Navigation, Part 6: Metrics for System Assessment
15 min
Beginner
Video
Theory
Take a systems engineering approach to verifying the autonomous navigation system end to end and learn how simulations and physical tests can complement each other. The video also covers a...
See More
Peter Ponders PID - Introduction
3 min
Beginner
Video
Theory
The purpose of this video is to inform the viewer about what to expect. My videos go much deeper than the typical videos. They are geared for graduate st...
See More
Control Bootcamp: Observability Example in Matlab
8 min
Beginner
Video
Application
This video explores observability in Matlab on the example system of an inverted pendulum on a cart.
See More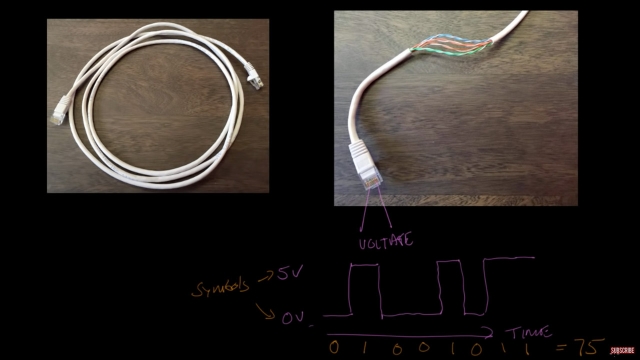
Sending digital information over a wire | Networking tutorial (1 of 13)
4 min
Beginner
Video
Theory
This video lecture is the beginning of an exploration of computer networking with the basics of sending digital information with a copper wire.
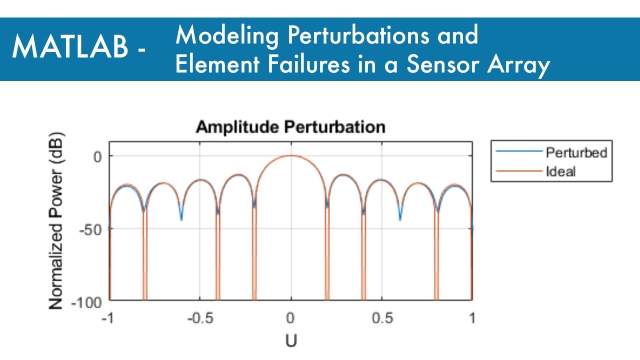
Modeling Perturbations and Element Failures in a Sensor Array
Beginner
Example
Demonstration
This MATLAB example shows how to model amplitude, phase, position and pattern perturbations as well as element failures in a sensor array.
See More
Converting Constrained Optimization to Unconstrained Optimization Using the ...
54 min
Beginner
Video
Theory
In this video we show how to convert a constrained optimization problem into an approximately equivalent unconstrained optimization problem using the penalty...
See More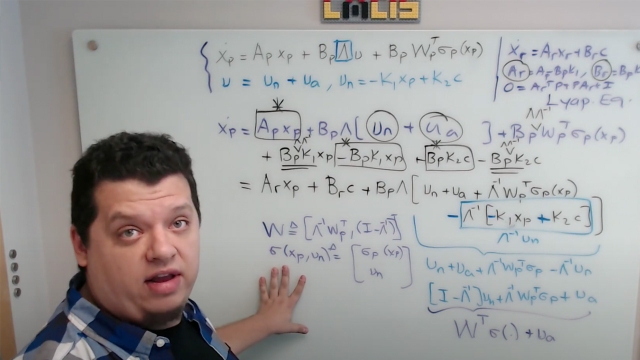
Model Reference Adaptive Control Fundamentals (Dr. Tansel Yucelen)
91 min
Beginner
Video
Theory
Forum on Robotics & Control Engineering (FoRCE, http://force.eng.usf.edu/) Seminar Series: "Model Reference Adaptive Control Fundamentals" (Dr. Tansel Yucelen)
See More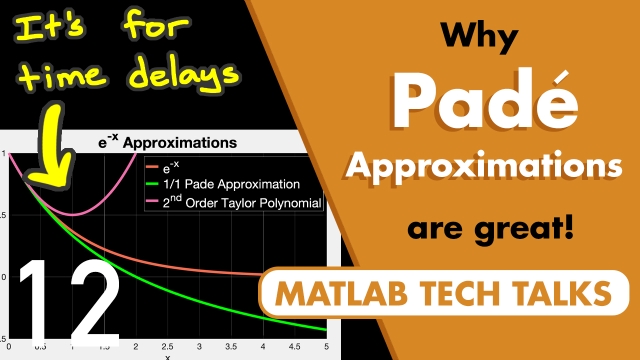
Why Padé Approximations Are Great! | Control Systems in Practice
Beginner
Video
Theory
Watch an introduction to Padé approximations. Learn what Padé approximations are and how to calculate them, why they are important, and when to use them—specifically in the context of time...
See More
Model Identification and Adaptive Control - From Windsurfing to Telecommunic...
Beginner
Book
Theory
This book is based on a workshop entitled: "Model Identification and Adaptive Control: From Windsurfing to Telecommunications" held in Sydney, Australia, on December 16, 2000. The workshop...
See More
Control System Lectures - Bode Plots, Introduction
12 min
Beginner
Video
Theory
This lecture is an introduction to frequency response methods, and in particular describes the Bode plot. I go through how it is generated and why we use it to visualize the frequency...
See More
A* Pathfinding (E01: algorithm explanation)
12 min
Beginner
Video
Theory
Welcome to the first part in a series teaching pathfinding for video games. In this episode we take a look at the A* algorithm and how it works.
See More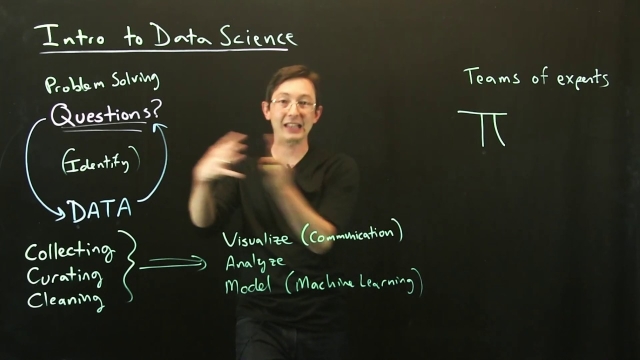
Intro to Data Science: What is Data Science?
8 min
Beginner
Video
Theory
This lecture provides an overview of the various components of data science, including data collection, cleaning, and curation, along with visualization, analysis, and machine learning (i.e...
See More
Machine Learning Control: Overview
10 min
Beginner
Video
Theory
This lecture provides an overview of how to use machine learning optimization directly to design control laws, without the need for a model of the dynamics.
See More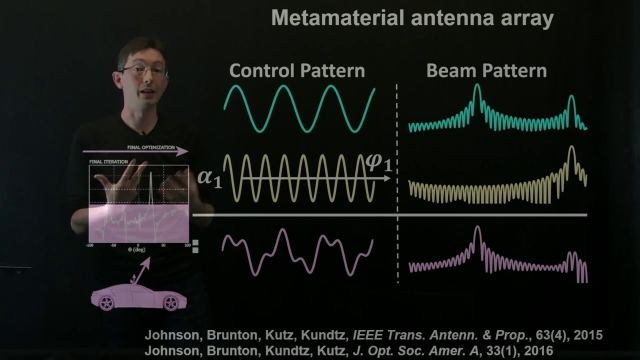
Extremum Seeking Control Applications
19 min
Beginner
Video
Application
This lecture highlights some of the many applications of extremum-seeking control (ESC) performed by Steve Brunton and collaborators.
See More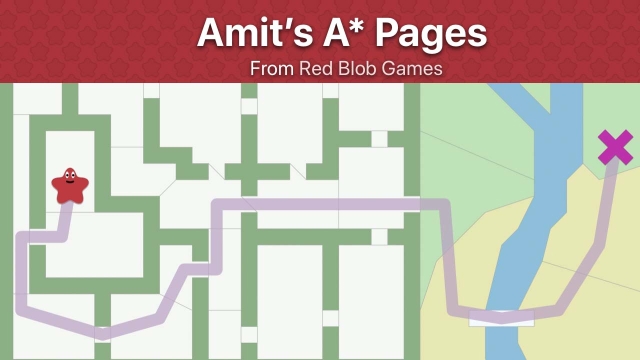
Introduction to the A* Algorithm
15 min
Beginner
Article / Blog
Application
An interactive visual explanation of the A* algorithm using motivating examples from computer games.
See More
Video Lectures on Automatic Control
Beginner
Video
Theory
A collection of 32 video lectures on automatic control by Dr. Rajesh Joseph Abraham.
See More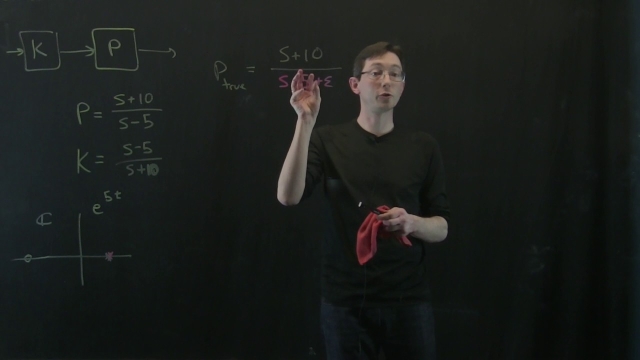
Control Bootcamp: Cautionary Tale About Inverting the Plant Dynamics
5 min
Beginner
Video
Theory
Here we show an example of why it can be a very bad idea to invert some plant dynamics, for example with unstable eigenvalues, for loop shaping.
See More
Regulatory PID (Polish)
18 min
Beginner
Video
Theory
W tym odcinku, opisze wam podstawy działania regulatorów PID.
See More
Reinforcement Learning for Engineers, Part 5: Overcoming the Practical Chall...
16 min
Beginner
Video
Theory
This video addresses a few challenges that occur when using reinforcement learning for production systems and provides some ways to mitigate them. Even if there aren’t straightforward ways...
See More
What Is a Control System and Why Should I Care? (Part 2)
34 min
Beginner
Video
Demonstration
This second video introduces some of the methods that engineers use to build control systems. It shows how we use science to help us derive models of systems from both measurements and...
See More