


Block Diagram Algebra
89 min
Beginner
Video
Theory
In this video we introduce block diagrams (AKA signal flow diagrams). We explore how they are used to describe complex systems as well as how to perform blo...
See More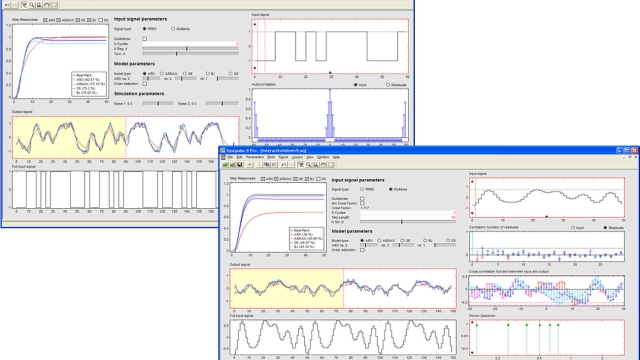
ITSIE: An Interactive Software Tool for System Identification Education
Beginner
App
Application
ITSIE is an Interactive Tool for System Identification Education. The tool is developed using Sysquake, a Matlab-like language with fast execution and excellent facilities for interactive...
See More
Process Dynamics and Control Course
Beginner
Course
Theory
This course focuses on a complete start to finish process of physics-based modeling, data driven methods, and controller design. Although some knowledge of computer programming is required...
See More
Control Systems in Practice, Part 8: The Gang of Six in Control Theory
18 min
Beginner
Video
Theory
When analyzing feedback systems, we can get caught up thinking solely about the relationship between the reference signal and the output. However, to fully understand how a feedback system...
See More
Systems Engineering, Part 1: What Is Systems Engineering?
15 min
Beginner
Video
Theory
This video covers what systems engineering is and why it’s useful. We will present a broad overview of how systems engineering helps us develop complex projects that meet the program...
See More
How Simulations Work
30 min
Beginner
Article / Blog
Theory
This article sets out the critical aspects of building good simulations — that is, simulations that are accurate, easy to develop and analyze, and fast. The first sections deal with how a...
See More
Trimming and Linearization, Part 2: The Practical Side of Linearization
11 min
Beginner
Video
Theory
With a general understanding of linearization, you might run into a few snags when trying to linearize realistic nonlinear models. These snags can be avoided if you have a more practical...
See More
Learning From Data
Beginner
Course
Theory
This is an introductory course in machine learning (ML) that covers the basic theory, algorithms, and applications. ML is a key technology in Big Data, and in many financial, medical...
See More
Understanding Closed-Loop Control
9 min
Beginner
Video
Demonstration
This lecture discusses the differences between open loop and closed loop control in a very easy and intuitive way. Daily examples, like a dishwasher, plant irrigation, and car speed systems...
See More
Nyquist Stability Criterion, Part 2
18 min
Beginner
Video
Theory
An explanation of the Nyquist Stability Criterion part 2. This video steps through the how to sketch a Nyquist plot by hand, what to do if there are open loop pools on the imaginary axis...
See More
Why Choose Deep Learning? Deep Learning for Engineers, Part 1
15 min
Beginner
Video
Theory
This video introduces deep learning from the perspective of solving practical engineering problems. The goal is to provide an introduction to the range of practical engineering problems that...
See More
Resonance in Nature and Bioinspired Squid Robots
18 min
Beginner
Video
Demonstration
Bioinspired robots combine the best of both biology and engineering. Using tools learned from nature, we can build squid-like and other squishy robots to improve current capabilities in...
See More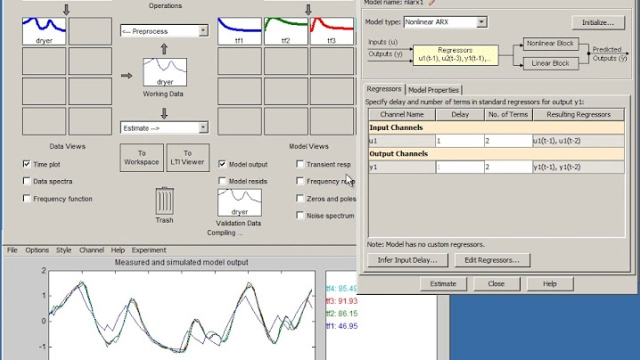
Introduction to System Identification
46 min
Beginner
Video
Theory
In this webinar, you will have a unique chance to learn about system identification from a world-renowned subject expert, Professor Lennart Ljung. Professor Ljung will explain the basic...
See More
Machine Learning & Text Processing Lectures
Beginner
Video
Theory
This is the video lecture collection by Victor Lavrenko.
See More
Artificial Intelligence
6 min
Beginner
Video
Theory
This lecture discusses artificial intelligence (AI) in the context of data science and machine learning.
See More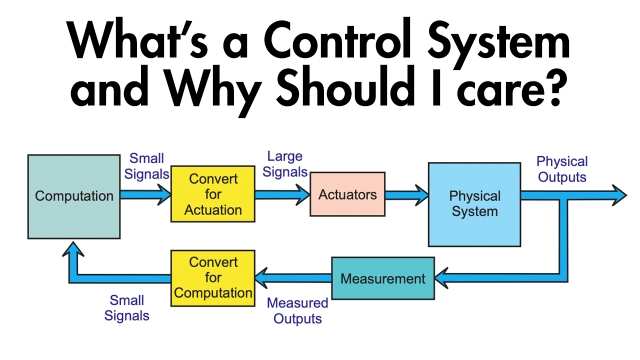
What's a Control System and Why Should I Care?
Beginner
Article / Blog
Theory
This paper is designed as a primer for college level STEM students about to take their first formal class in feedback control systems. This means that the explanations assume the reader has...
See More
Discrete control #4: Discretize with the matched method
14 min
Beginner
Video
Theory
This is the fourth video on discrete control and in this video we are going to continue exploring the different techniques we can use to discretize a continuous system and talk about the...
See More
Trimming and Linearization, Part 1: What is Linearization?
14 min
Beginner
Video
Theory
Why go through the trouble of linearizing a model? To paraphrase Richard Feynman, it’s because we know how to solve linear systems. With a linear model we can more easily design a controller...
See More
What Is Extremum Seeking Control? | Learning-Based Control
16 min
Beginner
Video
Theory
Get an introduction to extremum seeking control—an adaptive control method for finding an optimal control input or set of system parameters without needing a model of your system, static...
See More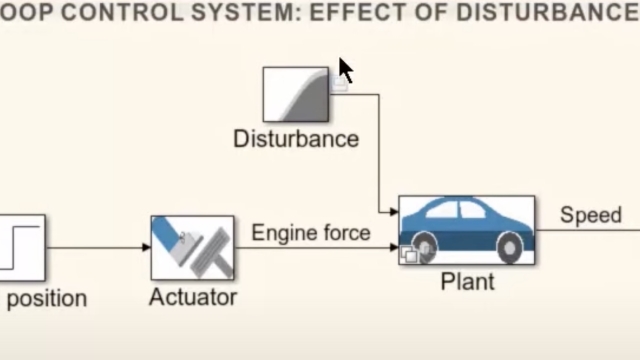
Understanding Control Systems: The Disturbance Rejection Problem
6 min
Beginner
Video
Demonstration
This video provides a demonstration using a car to show how you can simulate open- and closed-loop systems in Simulink®.
First, you will learn how to model and tune open-loop systems. The...
See More
Nyquist Stability Criterion, Part 1
16 min
Beginner
Video
Theory
An explanation of the Nyquist Stability Criterion. This video steps through the importance of the criterion, how to interpret the Nyquist plot graphically, and why it is the way it is....
See More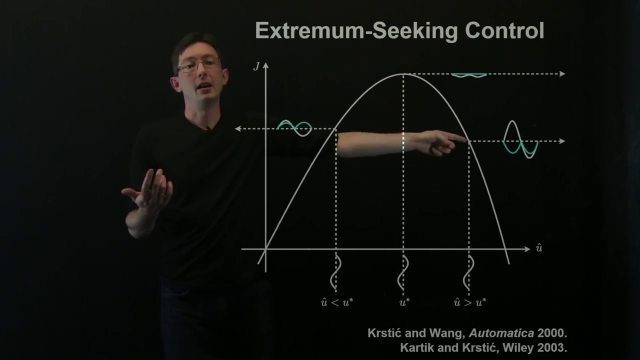
Extremum Seeking Control in Matlab
17 min
Beginner
Video
Application
This lecture explores extremum-seeking control (ESC) on a simple example in Matlab. In particular, a discrete-time (digital) version of ESC is coded in a Matlab script.
See More
Improving the Beginner's PID - Introduction
30 min
Beginner
Article / Blog
Application
In conjunction with the release of the new Arduino PID Library Brett has released this series of posts that explain his PID code. He start's with what he call's “The Beginner’s PID.” He...
See More
Control Bootcamp: Kalman Filter Example in Matlab
22 min
Beginner
Video
Application
This lecture explores the Kalman Filter in Matlab on an inverted pendulum on a cart.
See More
A real control system - how to start designing
26 min
Beginner
Video
Application
Let’s design a control system the way you might approach it in a real situation rather than an academic one. In this video, I step through a control problem and show how control theory is...
See More