

![Controllability, Reachability, and Eigenvalue Placement [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_304.jpg?itok=qj48C5IZ)
Controllability, Reachability, and Eigenvalue Placement [Control Bootcamp]
10 min
Beginner
Video
Theory
This lecture explains the equivalence of controllability, reachability, and the ability to arbitrarily place eigenvalues of the closed loop system.
See More
Control Systems Lectures - LTI Systems
7 min
Beginner
Video
Theory
This lecture describes what it means when we say a system is linear and time invariant. I also try to give an example as to why these systems are so important when designing control systems...
See More
Bode Stability Criterion in Frequency Response Analysis Intro
12 min
Beginner
Video
Theory
The Bode stability criterion allows us to quickly determine the stability and relative stability of a transfer function. It uses a graphical method that can ...
See More
Time domain - tutorial 2: signal representation
2 min
Beginner
Video
Theory
In this video, we review how to represent information as a signal. The information can be anything such as voice (1D) or an image (2D) or even a video (3D). ...
See More
Peter Ponders PID - Feed Forward Theory and Calculations
6 min
Beginner
Video
Theory
Discrete control #5: The bilinear transform
15 min
Beginner
Video
Theory
This is video number five on discrete control and here, we’re going to cover the famous and useful bilinear transform. The bilinear transform is yet another method for converting, or mapping...
See More
Machine Learning Overview
7 min
Beginner
Video
Theory
This lecture provides an overview of machine learning, and how it fits into this introductory video sequence on data science. We discuss how machine learning involves "modeling with data".
See More
Feedforward Control Intro
7 min
Beginner
Video
Theory
If we know how a disturbance will affect an output, we can proactively change our manipulated variable to counteract it.
See More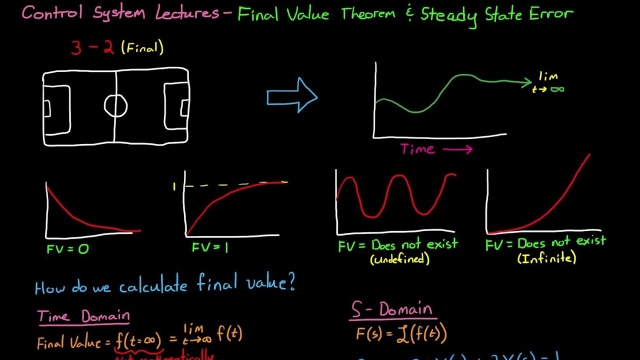
Final Value Theorem and Steady State Error
12 min
Beginner
Video
Theory
This Final Value Theorem is a way we can determine what value the time domain function approaches at infinity but from the S-domain transfer function. This is very helpful when we're trying...
See More
Neural Networks: Caveats
8 min
Beginner
Video
Theory
This lecture discusses some key limitations of neural networks and suggests avenues of ongoing development.
See More
Direct Synthesis for PID Design Intro
11 min
Beginner
Video
Theory
Direct Synthesis for PID Design Intro
See More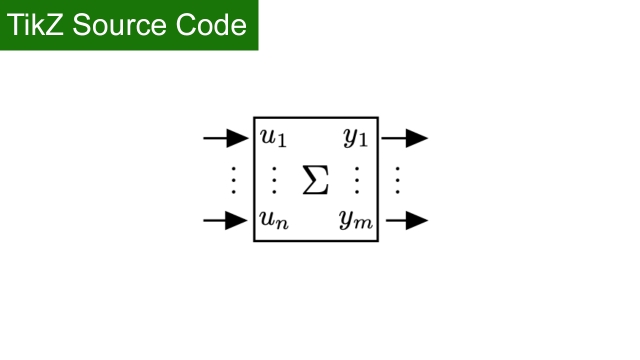
TikZ source Code: A single MIMO system
Beginner
Source Code
Application
TikZ source Code: A single MIMO system
See More")
The Fast Fourier Transform (FFT)
8 min
Beginner
Video
Application
Here I introduce the Fast Fourier Transform (FFT), which is how we compute the Fourier Transform on a computer. The FFT is one of the most important algorithms of all time.
See More
Understanding PID Control, Part 3: Expanding Beyond a Simple Derivative
11 min
Beginner
Video
Theory
This video describes how to make an ideal PID controller more robust when controlling real systems that don’t behave like ideal linear models. Noise is generated by sensors and is present in...
See More
Introduction to Ordinary Differential Equations
35 min
Beginner
Video
Theory
In this video we introduce the concept of ordinary differential equations (ODEs). We give examples of how these appear in science and engineering as well as...
See More
A Visual Introduction to Machine Learning
Beginner
Article / Blog
Theory
Machine Learning Explained in interactive visualizations (part 1).
See More
Lecture 9: Time response and Time domain specifications
35 min
Beginner
Video
Theory

Gaussian/Normal Distributions
99 min
Beginner
Video
Theory
In this video we discuss the Gaussian (AKA Normal) probability distribution function. We show how it relates to the error function (erf) and discuss how to ...
See More
Lecture 26: Stability examples, GM and PM using Nyquist Stability Criterion
56 min
Beginner
Video
Theory

Control Bootcamp: Sensitivity and Robustness
9 min
Beginner
Video
Theory
Here we show that peaks in the sensitivity function result in a lack of robustness.
See More
The Routh-Hurwitz Stability Criterion
82 min
Beginner
Video
Theory
In this video we explore the Routh Hurwitz Stability Criterion and investigate how it can be applied to control systems engineering. The Routh Hurwitz Stabi...
See More
Posicast Control 2 - ( In English )
5 min
Beginner
Video
Theory
This video is about the Half-Cycle Posicast. It includes some hints about how to simulate this type of control using Simulink
See More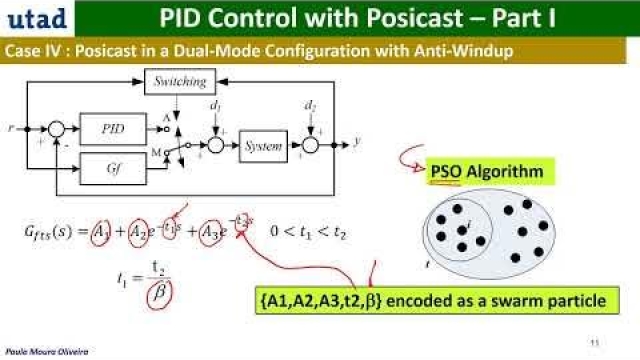
PID Control with Posicast 7 - ( In English )
12 min
Beginner
Video
Theory
In this video closed-loop configurations with PID controllers and Posicast are introduced.
See More
The Laplace Transform - A Graphical Approach
13 min
Beginner
Video
Theory
A lot of books cover how to perform a Laplace Transform to solve differential equations. This video tries to show graphically what the Laplace Transform is doing and why figuring out the...
See More
Standing Waves Demonstration
44 min
Beginner
Video
Theory
In this video we demonstrate standing waves. We show how the system can be excited by oscillating at specific frequencies to generating standing waves. The...
See More