


Understanding PID Control, Part 4: A PID Tuning Guide
12 min
Beginner
Video
Theory
It can be difficult to navigate all the resources that promise to explain the secrets of PID tuning. Some proclaim that PID tuning is an art that requires finesse and experience, while...
See More
Modeling Physical Systems, An Overview
7 min
Beginner
Video
Theory
This video sets the stage for the topics that I want to cover over the next month or two. This is an overview of how you go from a physical system to a linear model where you can design a...
See More
Understanding Kalman Filters, Part 2: State Observers
8 min
Beginner
Video
Theory
Learn the working principles of state observers, and discover the math behind them. State observers are used for estimating the internal states of a system when you can’t directly measure...
See More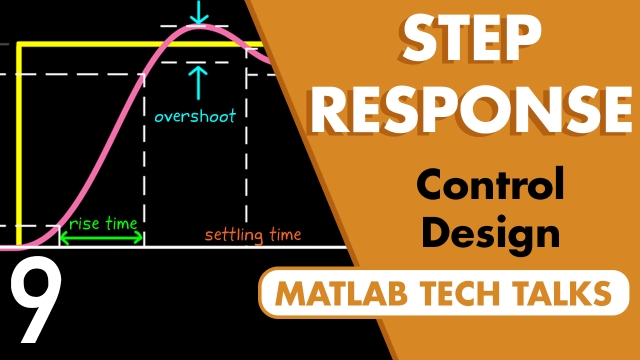
Control Systems in Practice, Part 9: The Step Response
15 min
Beginner
Video
Theory
This video covers a few interesting things about the step response. We’ll look at what a step response is and some of the ways it can be used to specify design requirements for closed loop...
See More
An Introduction to Multi-Agent Reinforcement Learning
Beginner
Video
Theory
Learn what multi-agent reinforcement learning is and some of the challenges it faces and overcomes. You will also learn what an agent is and how multi-agent systems can be both cooperative...
See More
Model Predictive Control
12 min
Beginner
Video
Theory
This lecture provides an overview of model predictive control (MPC), which is one of the most powerful and general control frameworks. MPC is used extensively in industrial control settings...
See More
Reinforcement Learning for Engineers, Part 3: Policies and Learning Algorith...
17 min
Beginner
Video
Theory
This video provides an introduction to the algorithms that reside within the agent. We’ll cover why we use neural networks to represent functions and why you may have to set up two neural...
See More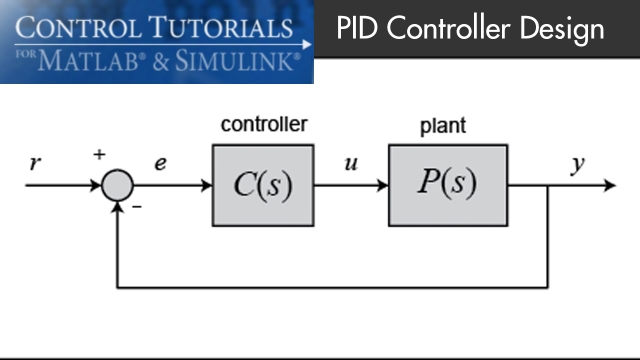
Introduction: PID Controller Design
30 min
Beginner
Article / Blog
Application
In this tutorial we will introduce a simple, yet versatile, feedback compensator structure: the Proportional-Integral-Derivative (PID) controller. The PID controller is widely employed...
See More
Adaptive Control Basics: What Is Model Reference Adaptive Control?
17 min
Beginner
Video
Theory
Use an adaptive control method called model reference adaptive control (MRAC). This controller can adapt in real time to variations and uncertainty in the system that is being controlled...
See More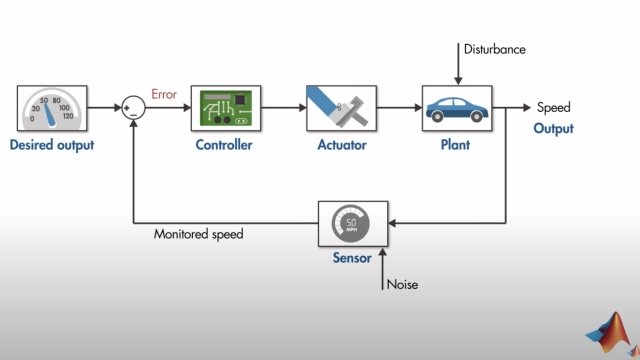
Understanding Control Systems: Components of a Feedback Control System
5 min
Beginner
Video
Demonstration
This video introduces the components of a feedback control system and how they interact with each other.
Learn basic terminology by walking through examples that include driving a car...
See More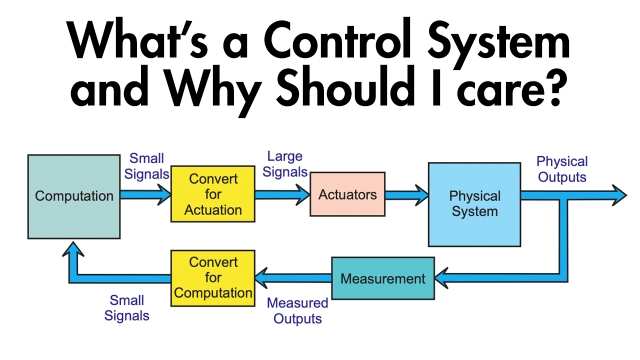
What's a Control System and Why Should I Care?
Beginner
Article / Blog
Theory
This paper is designed as a primer for college level STEM students about to take their first formal class in feedback control systems. This means that the explanations assume the reader has...
See More
What Is Extremum Seeking Control? | Learning-Based Control
16 min
Beginner
Video
Theory
Get an introduction to extremum seeking control—an adaptive control method for finding an optimal control input or set of system parameters without needing a model of your system, static...
See More
Understanding the Z-Transform
20 min
Beginner
Video
Theory
This intuitive introduction shows the mathematics behind the Z-transform and compares it to its similar cousin, the discrete-time Fourier transform. Mathematically, the Z-transform is...
See More
Nyquist Stability Criterion, Part 1
16 min
Beginner
Video
Theory
An explanation of the Nyquist Stability Criterion. This video steps through the importance of the criterion, how to interpret the Nyquist plot graphically, and why it is the way it is....
See More
Trimming and Linearization, Part 1: What is Linearization?
14 min
Beginner
Video
Theory
Why go through the trouble of linearizing a model? To paraphrase Richard Feynman, it’s because we know how to solve linear systems. With a linear model we can more easily design a controller...
See More
MATLAB toolbox for control 101 course
Beginner
Software
Theory
Community toolbox project led by Anthony Rossiter and sponsored by MathWorks. The project incorporates input from various international collaborators. The aim is to make the developed...
See More
A real control system - how to start designing
26 min
Beginner
Video
Application
Let’s design a control system the way you might approach it in a real situation rather than an academic one. In this video, I step through a control problem and show how control theory is...
See More
EGGN 510 - Lecture 02-1 Digital Image Fundamentals
9 min
Beginner
Video
Theory
This is a video lecture of EGGN 510 Image and Multidimensional Signal Processing by William Hoff.
See More
Discrete control #2: Discretize! Going from continuous to discrete domain
24 min
Beginner
Video
Theory
This is the second video in the discrete control series. It focuses on discretizing a continuous system - getting to the z-domain from the s-domain.
See More
Improving the Beginner's PID - Introduction
30 min
Beginner
Article / Blog
Application
In conjunction with the release of the new Arduino PID Library Brett has released this series of posts that explain his PID code. He start's with what he call's “The Beginner’s PID.” He...
See More
Understanding Control Systems: Feedback Control Systems
6 min
Beginner
Video
Theory
This video provides introductory examples to learn about the basics of feedback control (closed-loop control) systems.
Learn how feedback control is used to automate processes and discover...
See More
Drone Simulation and Control, Part 1: Setting Up the Control Problem
14 min
Beginner
Video
Theory
Quadcopters and other styles of drones are extremely popular, partly because they have sophisticated programmed control systems that allow them to be stable and fly autonomously with very...
See More
Control Systems in Practice, Part 4: Why Time Delay Matters
15 min
Beginner
Video
Theory
Time delays exist in two varieties: signal distorting delays, like phase lag, in which each frequency is delayed by a different amount of time, resulting in a distorted signal shape; and non...
See More
Understanding Kalman Filters, Part 5: Nonlinear State Estimators
8 min
Beginner
Video
Theory
This video explains the basic concepts behind nonlinear state estimators, including extended Kalman filters, unscented Kalman filters, and particle filters.
A Kalman filter is only defined...
See More
Linear Regression
10 min
Beginner
Video
Theory
Linear regression is a cornerstone of data-driven modeling; here we show how the SVD can be used for linear regression.
See More