

![Denoising Data with FFT [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_359.jpg?itok=UEtxZc00 "Denoising Data with FFT [Python]")
Denoising Data with FFT [Python]
10 min
Beginner
Video
Application
This video describes how to clean data with the Fast Fourier Transform (FFT) in Python.
See More
TikZ source Code: matlab2tikz example
Beginner
Source Code
Application
TikZ source Code: matlab2tikz example
See More
The Fourier Transform and Convolution Integrals
10 min
Beginner
Video
Theory
This video describes how the Fourier Transform maps the convolution integral of two functions to the product of their respective Fourier Transforms.
See More
Lecture 6: Signal Flow Graphs and Mason's Gain Rule
47 min
Beginner
Video
Theory

Relationship Between Poles and Performance of a Dynamic System
43 min
Beginner
Video
Theory
In this video we establish the relationship between pole locations and associated performance of a dynamic system. This relationship is useful to translate ...
See More
Lecture 29: State space representation
29 min
Beginner
Video
Theory
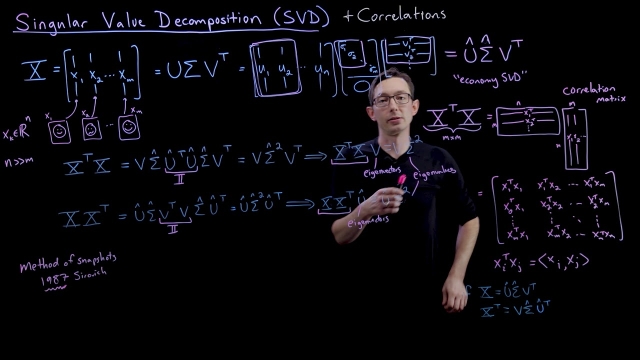
SVD Method of Snapshots
4 min
Beginner
Video
Theory
This video describes how to compute the singular value decomposition (SVD) using the method of snapshots, by Sirovich 1987.
See More")
Laplace domain – tutorial 2: Region of Convergence (ROC)
8 min
Beginner
Video
Theory
In this video, we learn five golden rules on how to quickly find the Region of Convergence (ROC) of Laplace transform. Learn Signal Processing 101 in 31 lect...
See More
Tutorial on Root Locus
56 min
Beginner
Video
Theory

Feedback Control and Block Diagram Introduction
10 min
Beginner
Video
Theory
How do engineers begin to design controllers to respond to disturbances and maintain set points? In this example, I'll discuss how we can design a controller...
See More
Laplace domain – tutorial 3: Laplace transform tables
17 min
Beginner
Video
Theory
In this video, we cover Laplace transform tables which help us to quickly find Laplace and inverse Laplace transforms. The main learning objective is to full...
See More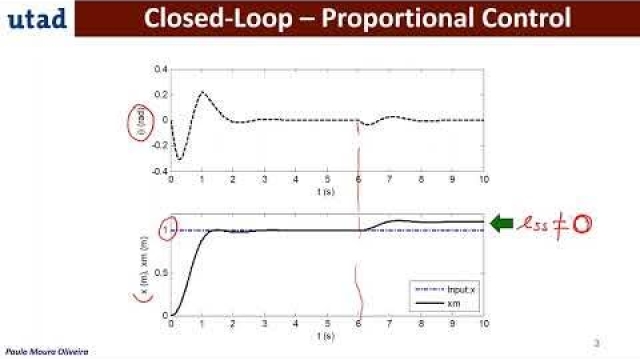
Posicast Control 5 - (In English)
7 min
Beginner
Video
Theory
In this video Posicast in closed-loop is illustrated using a gantry-crane system simulations.
See More
Types of Machine Learning 2
6 min
Beginner
Video
Theory
This lecture gives an overview of the main categories of machine learning, including supervised, un-supervised, and semi-supervised techniques, depending on the availability of expert labels...
See More
Internal Model Control IMC Introduction
4 min
Beginner
Video
Theory
Internal Model Control IMC Introduction
See More
Overview of Dempster-Shafer Theory (Evidence Theory)
Beginner
Article / Blog
Theory
This is an overview of Dempster-Shafer Theory (Evidence Theory) that provides an introduction, definition, basic information about combination rules, some issues with the theory, and the...
See More")
Control Bootcamp: Observability Example in Matlab (Part 2)
11 min
Beginner
Video
Application
This video continues to explore observability in Matlab on the example system of an inverted pendulum on a cart. We look at the observability Gramian.
See More
A Visual Introduction to Machine Learning
Beginner
Article / Blog
Theory
Machine Learning Explained in interactive visualizations (part 1).
See More
Peter Ponders PID - Yet Another Linear Quadratic Control Video but...
22 min
Beginner
Video
Theory

Sketching Root Locus Part 1
13 min
Beginner
Video
Theory
Sketching a root locus by hand can be done by following some simple rules. However, more important than actually being able to sketch to plot is being able to use our knowledge to design...
See More
Trimming a Simulink Model Using the Linear Analysis Tool
68 min
Beginner
Video
Application
In this video we show how to use the Linear Analysis Tool to trim a non-linear Simulink model. This is also known as finding an operating point or an equili...
See More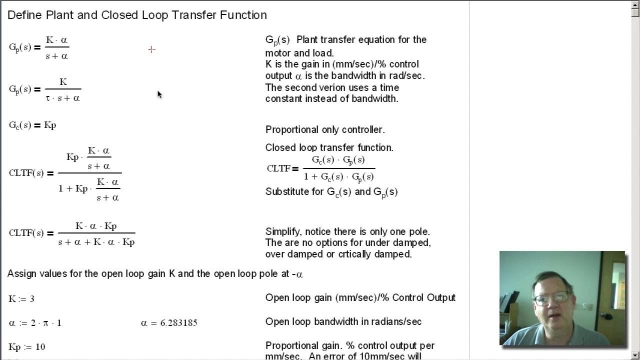
Peter Ponders PID - Controlling non-integrating single pole system. Part 1 ...
10 min
Beginner
Video
Theory
Part 1 shows why P only control shouldn't be used because the set point or target is never reached.Part 2 shows why I only control shouldn't be used because ...
See More
Control Bootcamp: Full-State Estimation
11 min
Beginner
Video
Theory
This video describes full-state estimation. An estimator dynamical system is constructed, and it is shown that the estimate converges to the true state. Further, the eigenvalues of the...
See More
Time Domain Analysis: Performance Metrics for a First Order System
78 min
Beginner
Video
Theory
In this video we introduce the concept of time domain analysis for dynamic systems. We examine a first order dynamic system and derive how various performan...
See More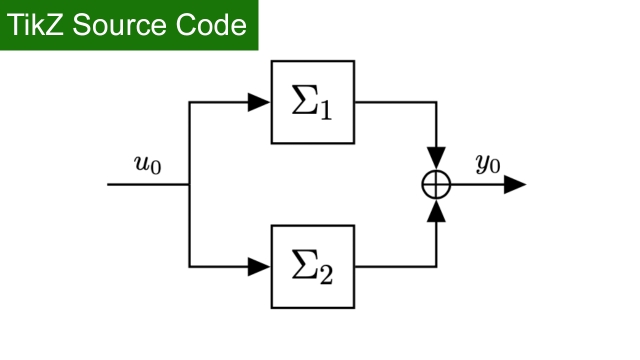
TikZ source Code: Parallel interconnection of two systems
Beginner
Source Code
Application
TikZ source Code: Parallel interconnection of two systems
See More![Fourier Series and Gibbs Phenomena [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_364.jpg?itok=-v1tvO0q "Fourier Series and Gibbs Phenomena [Python]")
Fourier Series and Gibbs Phenomena [Python]
8 min
Beginner
Video
Application
This video will describe how to compute the Fourier Series in Python and Gibbs Phenomena that appear for discontinuous functions.
See More