

![Motivation for Full-State Estimation [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_378.jpg?itok=AFDlS2AH "Motivation for Full-State Estimation [Control Bootcamp]")
Motivation for Full-State Estimation [Control Bootcamp]
11 min
Beginner
Video
Theory
This video discusses the need for full-state estimation. In particular, if we want to use full-state feedback (e.g., LQR), but only have limited measurements of the system, it is necessary...
See More
Lecture 1 Introduction to Automatic Control
29 min
Beginner
Video
Theory

Time domain - tutorial 3: signal transformations
11 min
Beginner
Video
Theory
In this video, we learn how different transformations can change the signal shape. Specifically, we cover time shifting & scaling as well as amplitude shift...
See More
Lecture 2: LTI Systems, Laplace Transform Review and Transfer Function
38 min
Beginner
Video
Theory

Linear Systems of Equations, Least Squares Regression, Pseudoinverse
11 min
Beginner
Video
Theory
This video describes how the SVD can be used to solve linear systems of equations. In particular, it is possible to solve nonsquare systems (overdetermined or underdetermined) via least...
See More
Frequency domain – tutorial 7: Fourier transform examples marathon
46 min
Beginner
Video
Theory
In this video, we solve lots of lots examples to practice how to quickly find Fourier transform using table of pairs and properties. The learning objective i...
See More
Control Systems with MATLAB - Modelling
27 min
Beginner
Video
Theory
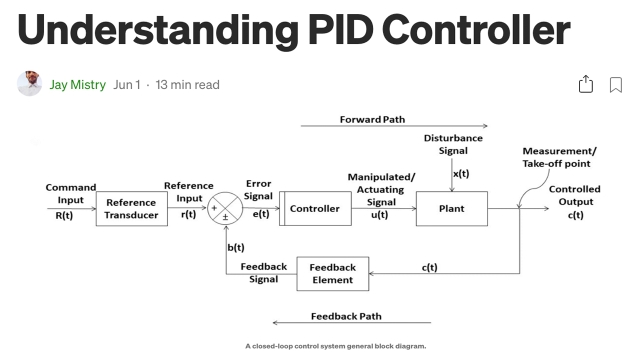
Understanding PID Controller
13 min
Beginner
Article / Blog
Theory
This blog post begins by walking through the basics and the theoretical part of the PID controllers. The controller is then tested, verified, and analyzed using MATLAB.
See More
PID Control with Posicast Control 8 - ( In English )
7 min
Beginner
Video
Theory
This is the follow up of PID Control with Posicast ( Part II )
See More
Laplace Transforms to Derive Transfer Functions
14 min
Beginner
Video
Theory
Once we have a state space model, we will take a Laplace Transform to derive the transfer function to determine the response of an output relative to an inpu...
See More
Direct Synthesis for PID Controller Design
12 min
Beginner
Video
Theory
What tuning parameters should you choose for your controller? The Direct Synthesis Model is one method control engineers use today to evaluate controller par...
See More
Bode Plots by Hand: Real Poles or Zeros
13 min
Beginner
Video
Theory
This is a continuation of the Control Systems Lectures. This video describes the benefit of being able to approximate a Bode plot by hand and explains what a Bode plot looks like for a...
See More
State Space Representation of Differential Equations
69 min
Beginner
Video
Theory
In this video we show how to represent differential equations (either linear or non-linear) in state space form. This is useful as it allows us to combine an...
See More
Peter Ponders PID-Fuzzy Logic vs PID
10 min
Beginner
Video
Theory
There are many academic and engineering papers showing how good fuzzy logic control is relative to PID control. Every FL vs PID paper I have seen compares...
See More
Humans, Robots, and Non-Prehensile Manipulation
12 min
Beginner
Video
Theory
This is a fun video that was inspired by a presentation I saw at the 2015 International Conference on Robotics and Automation (ICRA). I wanted to see if humans could duplicate the...
See More
Computing Euler Angles: The Euler Kinematical Equations and Poisson’s Kinema...
79 min
Beginner
Video
Theory
In this video we discuss how the time rate of change of the Euler angles are related to the angular velocity vector of the vehicle. This allows us to design...
See More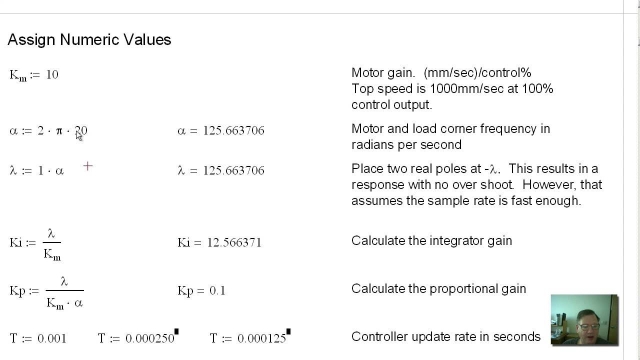
Peter Ponders PID - T0P1 Part 4, Misc Topics
20 min
Beginner
Video
Theory
This video covers another way to compute symbolic gains, the difference between having the P gain act on the error or just the feedback, extending bandwidt...
See More
Drone Simulation and Control, Part 5: Tuning the PID controller
14 min
Beginner
Video
Theory
In the last video, we learned how accurate, nonlinear models are great for simulation but they don’t lend themselves well to linear analysis and design. This video takes the nonlinear model...
See More
Control Bootcamp: Sensitivity and Complementary Sensitivity
11 min
Beginner
Video
Theory
Here we explore the sensitivity and complementary sensitivity functions, which are critical in understanding robustness and performance.
See More
Bandwidth of a Dynamic System
30 min
Beginner
Video
Theory
In this video we discuss the definition and physical meaning of the bandwidth of a dynamic system. We’ll see that this is a performance metric that is used ...
See More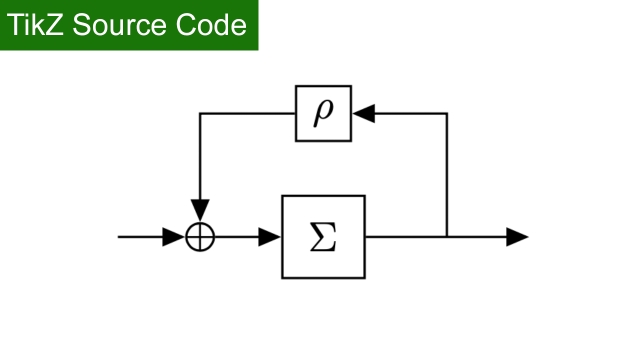
TikZ source Code: Feedback passivity index
Beginner
Source Code
Application
TikZ source Code: Feedback passivity index
See More![Fourier Series [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_362.jpg?itok=VuzjvIsu "Fourier Series [Python]")
Fourier Series [Python]
8 min
Beginner
Video
Application
This video will describe how to compute the Fourier Series in Python.
See More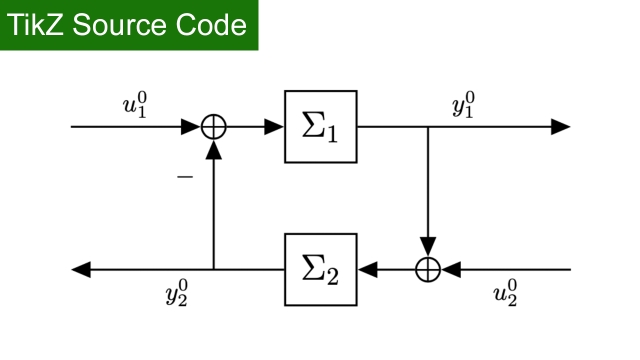
TikZ source Code: Two systems in negative feedback
Beginner
Source Code
Application
TikZ source Code: Two systems in negative feedback
See More
Fourier Series: Part 2
6 min
Beginner
Video
Theory
This video will show how to approximate a function with a Fourier series, which is an infinite sum of sines and cosines. We will discuss how these sines and cosines form a basis for the...
See More
Derivation and Solution of Laplace’s Equation
33 min
Beginner
Video
Theory
In this video we show how the heat equation can be simplified to obtain Laplace’s equation. We investigate how to solve Laplace’s equation using separation ...
See More