

TikZ source Code: Example Graph
Beginner
Source Code
Application
TikZ source Code: Example Graph
See More
The Fourier Transform and Derivatives
10 min
Beginner
Video
Theory
This video describes how the Fourier Transform can be used to accurately and efficiently compute derivatives, with implications for the numerical solution of differential equations.
See More![Randomized SVD Code [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_401.jpg?itok=3jscmfnI)
Randomized SVD Code [Matlab]
9 min
Beginner
Video
Application
This video describes the randomized singular value decomposition (rSVD) (Matlab code).
See More
What Is a Control System and Why Should I Care? (Part 1)
38 min
Beginner
Video
Application
This talk introduces the basic concepts of feedback with lots of visual examples.
See More
Control Systems with MATLAB - Time Domain Analysis
35 min
Beginner
Video
Theory

Derivation of the 1D Wave Equation
26 min
Beginner
Video
Theory
In this video, we derive the 1D wave equation. This partial differential equation (PDE) applies to scenarios such as the vibrations of a continuous string. ...
See More
Control Systems Lectures - LTI Systems
7 min
Beginner
Video
Theory
This lecture describes what it means when we say a system is linear and time invariant. I also try to give an example as to why these systems are so important when designing control systems...
See More
Bode Stability Criterion in Frequency Response Analysis Intro
12 min
Beginner
Video
Theory
The Bode stability criterion allows us to quickly determine the stability and relative stability of a transfer function. It uses a graphical method that can ...
See More
Lecture 17: Introduction to Compensators/Controllers
35 min
Beginner
Video
Theory

crash course on complex numbers
10 min
Beginner
Video
Theory
In this video, we quickly review “Complex Numbers”. The following materials are covered:1- Cartesian and polar representation of complex numbers2- how to con...
See More
Machine Learning Overview
7 min
Beginner
Video
Theory
This lecture provides an overview of machine learning, and how it fits into this introductory video sequence on data science. We discuss how machine learning involves "modeling with data".
See More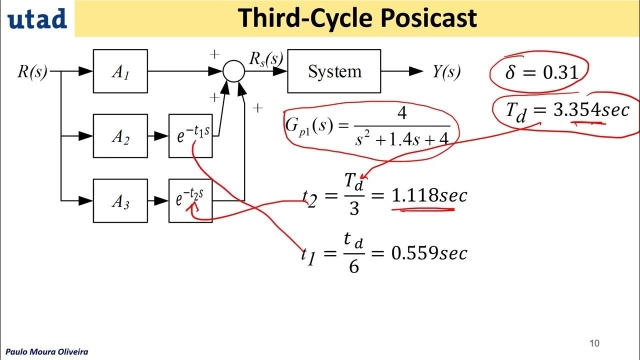
Posicast Control 6 - ( In English)
12 min
Beginner
Video
Theory
This video presents the transition from half-cycle to other cycles ( third-cycle, fourth-cycle,..)
See More
Feedforward Control Intro
7 min
Beginner
Video
Theory
If we know how a disturbance will affect an output, we can proactively change our manipulated variable to counteract it.
See More
Time domain - tutorial 8: LTI systems, impulse response & convolution
13 min
Beginner
Video
Theory
In this video, the following materials are covered:1) the beauty of linear & time invariant (LTI) systems2) why the impulse response of an LTI system is so i...
See More
Neural Networks: Caveats
8 min
Beginner
Video
Theory
This lecture discusses some key limitations of neural networks and suggests avenues of ongoing development.
See More
Direct Synthesis for PID Design Intro
11 min
Beginner
Video
Theory
Direct Synthesis for PID Design Intro
See More
Stanford CS229: Machine Learning | Autumn 2018
Beginner
Video
Theory
Autumn 2018 Stanford course on machine learning by Andrew Ng.
See More
Understanding PID Control, Part 3: Expanding Beyond a Simple Derivative
11 min
Beginner
Video
Theory
This video describes how to make an ideal PID controller more robust when controlling real systems that don’t behave like ideal linear models. Noise is generated by sensors and is present in...
See More
Bode Plots by Hand: Poles and Zeros at the Origin
8 min
Beginner
Video
Theory
This is a continuation of the Control Systems Lectures. This video describes the benefit of being able to approximate a Bode plot by hand and explains what a Bode plot looks like for a...
See More
Introduction to Ordinary Differential Equations
35 min
Beginner
Video
Theory
In this video we introduce the concept of ordinary differential equations (ODEs). We give examples of how these appear in science and engineering as well as...
See More
Fuzzy Inference System Walkthrough | Fuzzy Logic Part 2
16 min
Beginner
Video
Theory
This video walks step-by-step through a fuzzy inference system. Learn about concepts like membership function shapes, fuzzy operators, multiple-input inference systems, and rule firing...
See More
Peter Ponders PID - LQR Optimizing Two Outputs
16 min
Beginner
Video
Theory

The Laplace Transform
115 min
Beginner
Video
Theory
In this video we show how to perform the Laplace transform on a signal in the time domain to obtain its equivalent representation in the Laplace domain. Top...
See More
Setting Up Your Radio Connection - dRehmFlight VTOL
4 min
Beginner
Video
Application
This video will show you how to set up your radio to work with dRehmFlight VTOL. The code supports PWM, PPM, and SBUS type receivers, allowing you to connect and use 6 channels within the...
See More
Peter Ponders PID - Controlling a non-integrating single pole system. Part 3...
9 min
Beginner
Video
Theory
Part 3 uses PI control which is the only practical means of control a non-integrating single pole system.http://deltamotion.comhttp://forum.deltamotion.com
See More